Elektrický motor, zkráceně elektromotor, je elektrický stroj, s jehož pomocí se elektrická energie přeměňuje na mechanickou energii k pohonu různých mechanismů. Elektromotor je hlavním prvkem elektrického pohonu.
V některých provozních režimech elektrického pohonu elektromotor provádí zpětnou přeměnu energie, to znamená, že pracuje v elektrický generátor.
Podle typu vytvářeného mechanického pohybu mohou být elektromotory rotační, lineární atd. Elektromotorem se nejčastěji rozumí rotační elektromotor, protože se mu dostalo největšího uplatnění.
Oblast vědy a techniky, která studuje elektrické stroje, je elektromechanika. Všeobecně se má za to, že jeho historie začíná v roce 1821, kdy byl vytvořen první elektromotor M. Faradaye.
Obsah
- Konstrukce motoru
- Princip činnosti elektromotoru
- Klasifikace elektromotorů
- Typy elektromotorů
- Kolektorové motory
- Univerzální elektromotor
- Stejnosměrný kartáčovaný motor
- Bezkomutátorové motory
- Asynchronní motor
- Synchronní elektromotor
- Speciální elektromotory
- Servomotor
- Základní parametry elektromotoru
- Točivý moment motoru
- Výkon elektromotoru
- Mechanická síla
- Účinnost elektromotoru
- Frekvence otáčení
- Moment setrvačnosti rotoru
- Jmenovité napětí
- Elektrická časová konstanta
- Mechanické vlastnosti
- Porovnání charakteristik externě komutovaných elektromotorů
- Výskyt točivého momentu
- DC motory
- Buzení komutátorových motorů
- Pulzní proudový motor
- AC motor
- Univerzální kartáčované motory
Konstrukce motoru
Hlavní součásti rotačního elektromotoru jsou stator a rotor. Stator – stacionární část, rotor – otočná část.
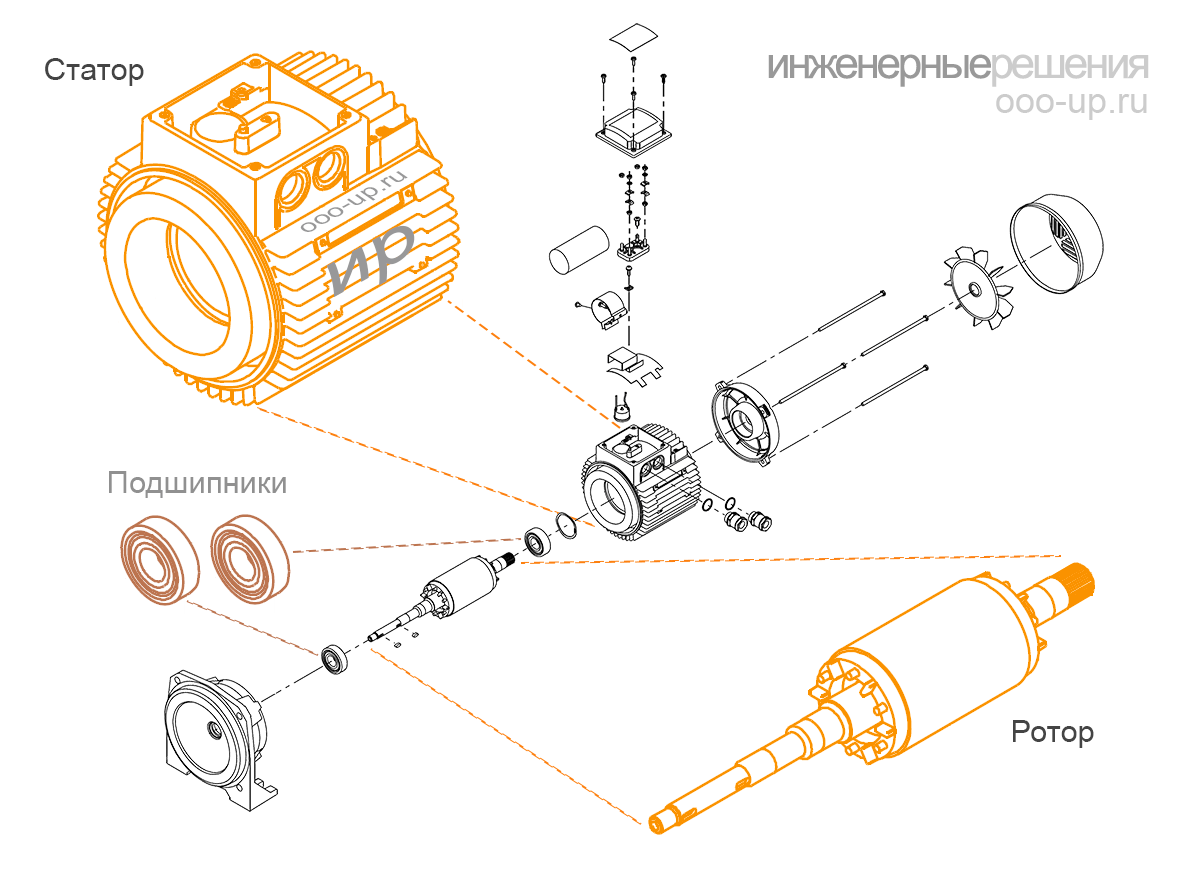
U většiny elektromotorů je rotor umístěn uvnitř statoru. Elektromotory, ve kterých je rotor umístěn mimo stator, se nazývají elektromotory invertního typu.
Princip činnosti elektromotoru
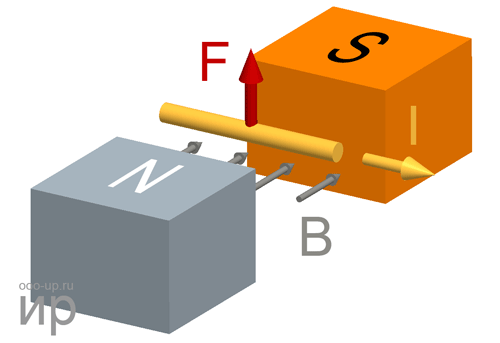
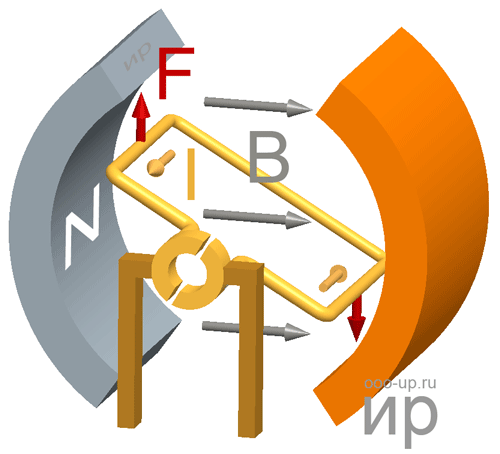
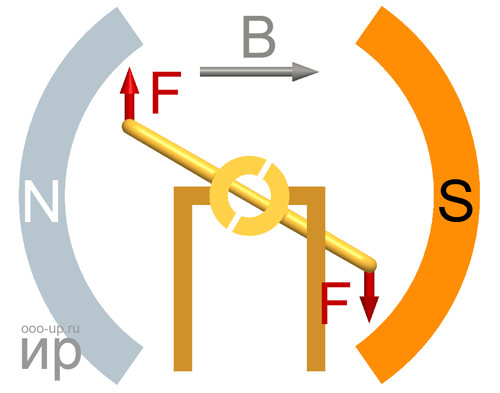
2. Pokud je vodič s proudem I ohnut do rámu a umístěn do magnetického pole, pak na dvě strany rámu, umístěné v pravém úhlu k magnetickému poli, budou působit opačně směřující síly F
4. Vyrobené elektromotory mají vícenásobné otáčky na kotvě pro zajištění většího konstantního točivého momentu.
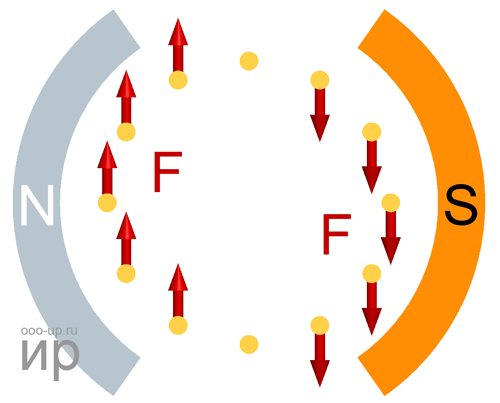
5. Magnetické pole mohou vytvářet jak magnety, tak elektromagnety. Elektromagnet se obvykle skládá z drátu navinutého kolem jádra. Podle zákona elektromagnetické indukce tedy proud tekoucí do rámů indukuje proud do vinutí elektromagnetu, který zase vytvoří magnetické pole.
- Podrobný popis principu činnosti různých typů elektromotorů:
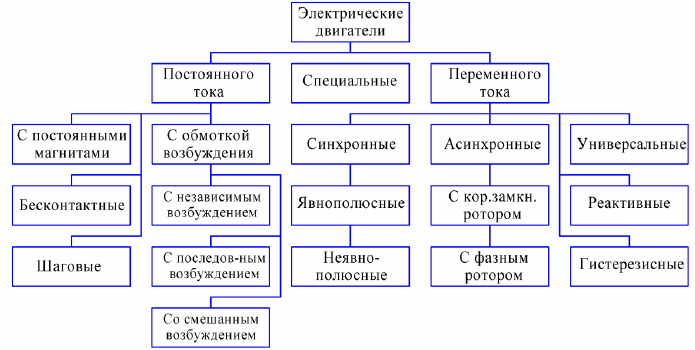
Klasifikace elektromotorů
- BDPT
(Brushless motor + EP | + DPR) - WFD
(Proudový motor s rotorem s vyčnívajícími póly a soustředěným statorovým vinutím + ED |+ DPR) - SDPMW
- SDPMP
- Hybridní
- Tato kategorie nepředstavuje samostatnou třídu elektromotorů, protože zařízení zařazená do uvažované kategorie (BDDC, VRM) jsou kombinací bezkomutátorového motoru, elektrického měniče (invertoru) a v některých případech i snímače polohy rotoru. . U těchto zařízení je elektrický měnič pro svou malou složitost a malé rozměry obvykle integrován do elektromotoru.
- Ventilový motor lze definovat jako elektromotor, který má snímač polohy rotoru, který řídí polovodičový měnič, který provádí koordinovanou komutaci vinutí kotvy [5].
- Stejnosměrný ventilový motor je stejnosměrný elektromotor, jehož spínacím zařízením ventilu je invertor řízený buď polohou rotoru, nebo fází napětí na vinutí kotvy, nebo polohou magnetického pole [1].
- Elektromotory používané v BLDC a VRD jsou střídavé motory a díky přítomnosti elektrického měniče v těchto zařízeních jsou připojeny ke stejnosměrné síti.
- Krokový motor není samostatnou třídou motorů. Konstrukčně se jedná o PMSM, SRD nebo hybridní SRD-PM.
- CMDC – komutátorový stejnosměrný motor
- BLDC – bezkomutátorový stejnosměrný motor
- EP – elektrický měnič
- DPR – snímač polohy rotoru
- VRD – spínaný reluktanční motor
- ADKR – asynchronní motor s rotorem nakrátko
- ADFR – asynchronní motor s vinutým rotorem
- SDOV – synchronní motor s budícím vinutím
- PMSM – synchronní motor s permanentními magnety
- SPMSM – synchronní motor s povrchovými permanentními magnety
- PMSD – synchronní motor s vestavěnými permanentními magnety
- SRM – synchronní reluktanční motor
- PM – permanentní magnety
- CP – frekvenční měnič
- kde M je točivý moment, Nm,
- F – síla, N,
- r – vektor poloměru, m
- kde Pnom – jmenovitý výkon motoru, W,
- nnom – jmenovité otáčky, min -1 [4]
- kde P je výkon, W,
- A – práce, J,
- t – čas, s
- kde s – vzdálenost, m
- kde je účinnost elektromotoru,
- P1 – dodávaný výkon (elektrický), W,
- P2 – užitečný výkon (mechanický), W
- elektrické ztráty – ve formě tepla v důsledku ohřevu vodičů s proudem;
- magnetické ztráty – ztráty v důsledku převrácení magnetizace jádra: ztráty v důsledku vířivých proudů, hystereze a magnetických následků;
- mechanické ztráty – ztráty třením v ložiskách, ventilaci, kartáčích (pokud existují);
- dodatečné ztráty – ztráty způsobené vyššími harmonickými magnetických polí vznikající v důsledku převodové struktury statoru, rotoru a přítomnosti vyšších harmonických magnetomotorické síly vinutí.
- kde n – otáčky motoru, ot./min
- kde J je moment setrvačnosti, kg∙m 2,
- m – hmotnost, kg
- DC motory,
- AC motory,
- univerzální motory.
- ventil (bezkartáčový),
- kolektor.
- Zapínání vinutí
(vícefázové)
(s kluznými kroužky a kartáči) –> 5 –>
Typy elektromotorů
Kolektorové motory
Komutátorový stroj je točivý elektrický stroj, ve kterém je alespoň jedno z vinutí zapojených do procesu hlavní přeměny energie připojeno ke kolektoru [1]. V komutátorovém motoru slouží sestava kartáč-komutátor jako snímač polohy rotoru a proudový spínač ve vinutí.

Univerzální elektromotor
Může pracovat na střídavý a stejnosměrný proud. Široce se používá v ručním elektrickém nářadí a některých domácích spotřebičích (vysavače, pračky atd.). V USA a Evropě se používal jako trakční elektromotor. Rozšířil se díky svým malým rozměrům, relativně nízké ceně a snadnému ovládání.
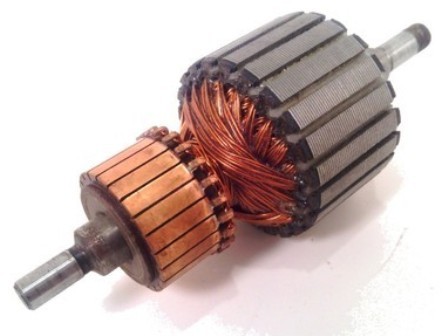
Stejnosměrný kartáčovaný motor
Elektrický stroj, který přeměňuje stejnosměrnou elektrickou energii na mechanickou energii. Výhody stejnosměrného elektromotoru jsou: vysoký rozběhový moment, otáčky, možnost plynule řídit rychlost otáčení, jednoduchost konstrukce a ovládání. Nevýhodou motoru je nutnost údržby jednotek komutátor-kartáč a omezená životnost z důvodu opotřebení komutátoru.
Bezkomutátorové motory
Bezkomutátorové motory mohou mít sběrací kroužky s kartáči, takže není třeba zaměňovat bezkomutátorové a bezkomutátorové motory.
Bezkomutátorový stroj je točivý elektrický stroj, ve kterém jsou všechna elektrická spojení vinutí zapojených do hlavního procesu přeměny energie prováděna bez posuvných elektrických kontaktů [1].
Asynchronní motor
Nejběžnější elektromotor v průmyslu. Výhody elektromotoru jsou: jednoduchost konstrukce, spolehlivost, nízká cena, dlouhá životnost, vysoký rozběhový moment a přetížitelnost. Nevýhodou asynchronního elektromotoru je obtížná regulace rychlosti otáčení.
Synchronní elektromotor
Synchronní motory se obvykle používají v aplikacích, kde je vyžadováno přesné řízení rychlosti otáčení, nebo kde je požadována maximální hodnota parametrů, jako je výkon/výtlak, účinnost atd.
Speciální elektromotory
Servomotor
Servomotory nejsou samostatnou třídou motorů. Jako servomotor lze použít stejnosměrné a střídavé elektromotory se snímačem polohy rotoru. Servomotor se používá jako součást servo mechanismu pro přesné ovládání úhlové polohy, rychlosti a zrychlení pohonu. K provozu vyžaduje servomotor poměrně složitý řídicí systém, který je obvykle navržen přímo pro servopohon.
Základní parametry elektromotoru
Točivý moment motoru
Točivý moment (synonyma: kroutící moment, kroutící moment, moment síly) je vektorová fyzikální veličina rovna součinu poloměru vektoru taženého od osy otáčení k místu působení síly a vektoru této síly.

Počáteční rozběhový moment je moment elektromotoru při rozběhu.
FAQ: V anglickém systému měr je síla měřena v uncové síle (oz, ozf, unce-force) nebo librové síle (lb, lbf, pound-force)
1 unce = 1/16 lb = 0,2780139 N (N)
1 lb = 4,448222 N (N)
točivý moment se měří v uncích na palec (oz∙in) nebo v librách na palec (lb∙in)
1 oz∙in = 0,007062 Nm (Nm)
1 lb∙in = 0,112985 Nm (Nm)
Výkon elektromotoru
Výkon motoru je užitečný mechanický výkon na hřídeli motoru.
Mechanická síla
Výkon je fyzikální veličina, která ukazuje, kolik práce vykoná mechanismus za jednotku času.

Práce je skalární fyzikální veličina rovna součinu průmětu síly do směru F a dráhy s, kterou urazí místo působení síly [2].

Pro rotační pohyb


Tímto způsobem můžete vypočítat hodnotu mechanického výkonu na hřídeli rotačního elektromotoru

FAQ: Jmenovitá hodnota je výrobcem stanovená hodnota parametru elektrického výrobku (přístroje), se kterou má pracovat, což je výchozí hodnota pro výpočet odchylek.
Účinnost elektromotoru
Účinnost elektromotoru je charakteristikou účinnosti stroje ve vztahu k přeměně elektrické energie na mechanickou energii.


- V tomto případě, ztráty v elektromotorech kvůli:
Účinnost elektromotoru se může lišit od 10 do 99 % v závislosti na typu a konstrukci.
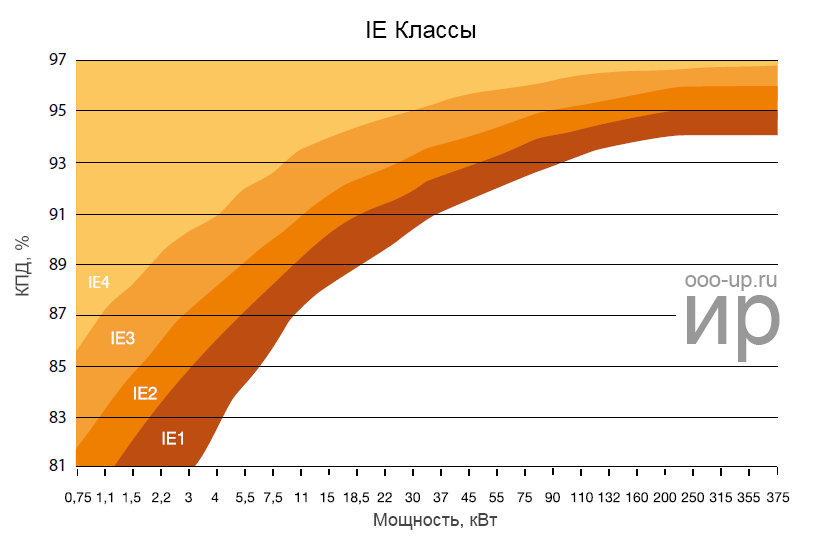
Mezinárodní elektrotechnická komise definuje požadavky na účinnost elektromotorů. Podle normy IEC 60034-31:2010 jsou pro synchronní a asynchronní motory definovány čtyři třídy účinnosti: IE1, IE2, IE3 a IE4.
Frekvence otáčení

Moment setrvačnosti rotoru
Moment setrvačnosti je skalární fyzikální veličina, která je mírou setrvačnosti tělesa v rotačním pohybu kolem osy, která se rovná součtu součinů hmotností hmotných bodů druhých mocnin jejich vzdáleností od osy.
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (kg∙m 2)
Moment setrvačnosti souvisí s momentem síly následujícím vztahem


Jmenovité napětí
Jmenovité napětí je napětí, pro které je síť nebo zařízení navrženo a ke kterému se vztahují jejich provozní charakteristiky [3].
Elektrická časová konstanta
Elektrická časová konstanta je doba počítaná od okamžiku přivedení konstantního napětí na elektromotor, během kterého proud dosáhne úrovně 63,21 % (1-1/e) své konečné hodnoty.

Mechanické vlastnosti
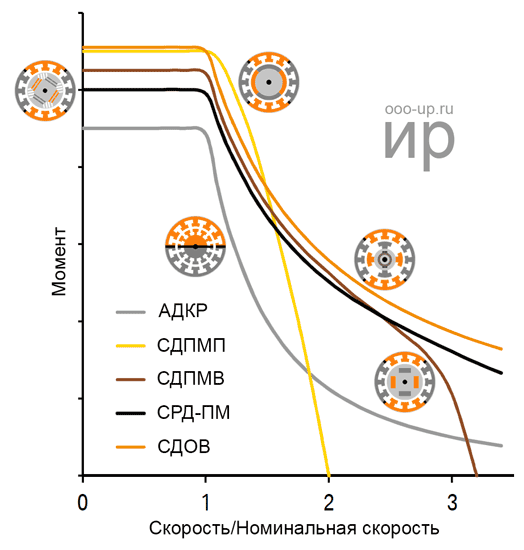
Mechanická charakteristika motoru je graficky vyjádřená závislost otáček hřídele na elektromagnetickém momentu při konstantním napájecím napětí.
Porovnání charakteristik externě komutovaných elektromotorů
Níže jsou uvedeny srovnávací charakteristiky externě komutovaných elektromotorů z pohledu aplikace jako trakční motory ve vozidlech.
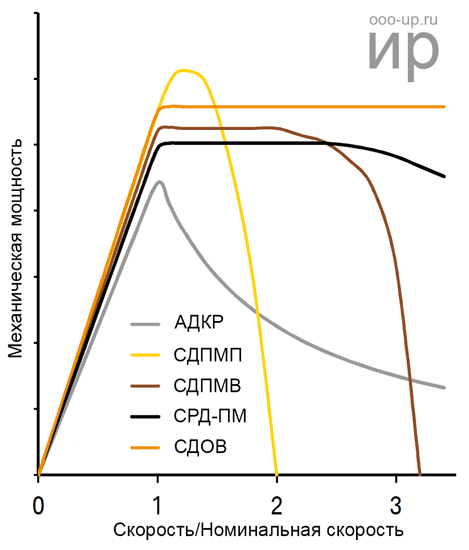
Závislost výkonu na rychlosti otáčení hřídele pro různé typy motorů s omezeným statorovým proudem
V závislosti na účelu, na zamýšlených provozních režimech a podmínkách, na typu napájení atd. lze všechny elektromotory klasifikovat podle několika parametrů: podle principu získání provozního momentu, podle způsobu provozu, podle typu napájecího proudu, podle způsobu fázového řízení, podle typu buzení atd. Podívejme se na klasifikaci elektromotorů podrobněji.

Výskyt točivého momentu
Točivý moment v elektromotorech lze získat jedním ze dvou způsobů: na principu magnetické hystereze nebo čistě magnetoelektricky. Hysterezní motor získává točivý moment hysterezní jev během magnetizační reverzace pevného magnetického rotoru, zatímco u magnetoelektrického motoru je točivý moment výsledkem interakce vystupujících magnetických pólů rotoru a statoru.

Magnetoelektrické motory dnes právem tvoří lví podíl na celkovém množství elektromotorů používaných v mnoha oblastech. Dělí se podle typu napájecího proudu na:
DC motory

U motoru napájeného stejnosměrným proudem je za spínání fází zodpovědný motor sám. To znamená, že ačkoliv je do elektrického stroje dodáván stejnosměrný proud, působením vnitřních mechanismů zařízení se magnetické pole ukazuje jako pohyblivé a je schopné udržet točivý moment rotoru (jako by působil střídavý proud ve vinutí statoru).
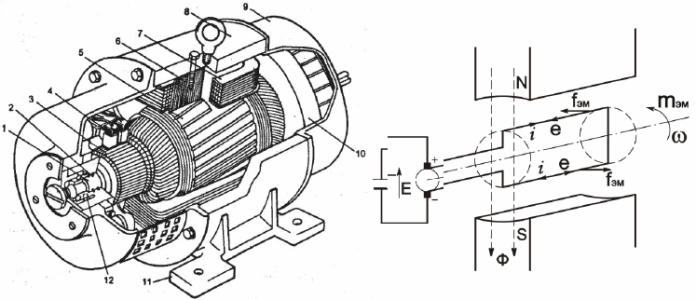
Konstrukce a princip činnosti stejnosměrného elektromotoru: 1 – kotva, 2 – hřídel, 3 – desky komutátoru, 4 – sestava kartáče, 5 – magnetický obvod kotvy, 6 – magnetický obvod induktoru, 7 – budicí vinutí, 8 – pouzdro induktoru , 9 – boční kryty , 10 – ventilátor, 11 – tlapky, 12 – ložiska.
Stejnosměrný motor se skládá ze stacionární části zvané induktor a pohyblivé části zvané kotva. V závislosti na provedení mohou být na budicím vinutí na induktoru umístěny permanentní magnety, což zjednodušuje konstrukci, ale neumožňuje regulovat magnetický tok motoru, který ovlivňuje jeho otáčky.
Podle způsobu vytváření pohyblivého magnetického pole se stejnosměrné motory dělí na:
Buzení komutátorových motorů
Podle způsobu buzení jsou komutátorové motory těchto typů: s nezávislým buzením z permanentních magnetů nebo elektromagnetů nebo se samobuzením. Motory buzené permanentními magnety obsahují magnety na rotoru. Motory s vlastním buzením mají na rotoru speciální vinutí kotvy, které lze zapojit paralelně, sériově nebo smíchat se speciálním budicím vinutím.
Pulzní proudový motor
Pulzující proudový motor je podobný stejnosměrnému motoru. Rozdíl spočívá v přítomnosti laminovaných vložek na rámu a také dalších laminovaných tyčí. Kromě toho má motor s pulzujícím proudem kompenzační vinutí. Takové motory se používají v elektrických lokomotivách, kde jsou obvykle poháněny usměrněným střídavým proudem.
AC motor
Střídavé motory, jak už název napovídá, jsou napájeny střídavým proudem. Mohou být synchronní nebo asynchronní.
U synchronních střídavých motorů se magnetické pole statoru pohybuje stejnou úhlovou rychlostí jako rotor, zatímco u asynchronních motorů je vždy určitá prodleva (charakterizovaná hodnotou skluzu s) – magnetické pole statoru se při jeho pohybu zdá být před rotorem, který se ho zase celou dobu snaží dohnat.
Vysoce výkonné synchronní motory (s výkonem stovek kilowattů) mají na rotoru budicí vinutí. Rotory méně výkonných synchronních motorů jsou vybaveny permanentními magnety, které tvoří póly. Hysterezní motory jsou také v principu synchronní motory.
Krokové motory jsou speciální kategorií synchronních motorů s vysokou přesností řízení rychlosti otáčení až po diskrétní počítání kroků.
Spínané synchronní reluktanční motory jsou napájeny přes invertor.
Střídavé indukční motory se vyznačují tím, že jejich úhlová rychlost otáčení rotoru je vždy menší než úhlová rychlost otáčení magnetického pole statoru. Asynchronní motory jsou jednofázové (se startovacím vinutím), dvoufázové (sem patří kondenzátorový motor), třífázové a vícefázové.
Návrh třífázového asynchronního elektromotoru s rotorem nakrátko
Asynchronní elektromotor se skládá jak ze stacionární (statorové) části, tak z pohyblivé (rotorové) části, které jsou drženy ložisky 1 a 11 instalovanými v bočních krytech 3 a 9. Rotor se skládá z hřídele 2, na které je magnetická obvod 5 s vinutím je pevný. Stator motoru se skládá z pouzdra 7, ke kterému je připevněno magnetické jádro 6. V drážkách magnetického jádra je umístěno třífázové vinutí 8. Víko svorkovnice 4 a ochranný plášť 12 oběžného kola 10 jsou rovněž připevněný k pouzdru.
Fázový rotor má třífázové vinutí, vyrobené jako statorové vinutí. Některé konce cívek jsou připojeny k nulovému bodu („hvězda“) a další konce jsou připojeny ke sběracím kroužkům. Na kroužky jsou umístěny kartáče, které vytvářejí kluzný kontakt s vinutím rotoru. U této konstrukce je možné k vinutí rotoru připojit spouštěcí nebo nastavovací reostat, který umožňuje měnit elektrický odpor v obvodu rotoru.
Asynchronní motor s frekvenčním měničem pro plynulou regulaci otáček hřídele změnou frekvence a napájecího napětí:

Univerzální kartáčované motory
Univerzální komutátorový motor může pracovat na stejnosměrný nebo střídavý proud (50 Hz). Má sekvenční buzení a používá se v domácích elektrospotřebičích, kde je vyžadována rychlost otáčení vyšší než maximální u běžných střídavých motorů 3000 ot./min. Výkon těchto motorů zpravidla nepřesahuje 200 W. Existuje tyristorové řízení rychlosti otáčení univerzálního motoru.
Vylepšenou verzí univerzálního motoru je synchronní motor se snímačem polohy rotoru, kde roli komutátoru plní elektronický měnič.
















