Tranzistor je všudypřítomnou a důležitou součástí moderní mikroelektroniky. Jeho účel je jednoduchý: umožňuje ovládat mnohem silnější pomocí slabého signálu.
Zejména může být použit jako řízená “závěrka”: nepřítomností signálu na “bráně” blokovat tok proudu, přiložením – povolit. Jinými slovy: jedná se o tlačítko, které se nestiskne prstem, ale zdrojem napětí. V digitální elektronice je tato aplikace nejběžnější.
Tranzistory jsou k dispozici v různých baleních: stejný tranzistor může vypadat úplně jinak. V prototypování jsou nejčastější případy:
Označení na schématech se také liší v závislosti na typu tranzistoru a označení standardu, který byl při kompilaci použit. Ale bez ohledu na variaci zůstává její symbol rozpoznatelný.
![]()
Obsah
- Bipolární tranzistory
- NPN a PNP
- FET
- N-kanál a P-kanál
- Připojení tranzistorů k buzení vysoce výkonných součástek
- LED ovládací obvod s provozním proudem 50 mA
- Uvažujme obvod s jinou zátěží
- Uvažujme další obvod, který má řadu zajímavých vlastností
- Způsoby, jak zkrátit dobu vypínání tranzistoru
- Kaskáda pro zvýšení výstupního proudu na bipolárních tranzistorech.
- Jak používat proudový zesilovací stupeň
Bipolární tranzistory
Bipolární tranzistory (BJT, bipolární tranzistory) mají tři kontakty:
Základna (základna) – přes ni malá proudodemknout velký; základna je uzemněna, aby ji blokovala
![]()
Hlavní charakteristikou bipolárního tranzistoru je indikátor hfe také známý jako zisk. Udává, kolikrát je proud procházející sekcí kolektor-emitor schopen projít tranzistorem ve vztahu k proudu báze-emitor.
Například pokud hfe = 100 a bází projde 0.1 mA, pak tranzistor projde sám sebou maximálně 10 mA. Pokud je v tomto případě součástka v sekci vysokého proudu, která spotřebovává např. 8 mA, bude jí poskytnuto 8 mA a tranzistor bude mít „marži“. Pokud existuje součástka, která odebírá 20 mA, bude jí poskytnuto maximálně 10 mA.
Také dokumentace pro každý tranzistor uvádí maximální přípustná napětí a proudy na kontaktech. Překročení těchto hodnot vede k nadměrnému zahřívání a snížení životnosti a silné překročení může vést ke zničení.
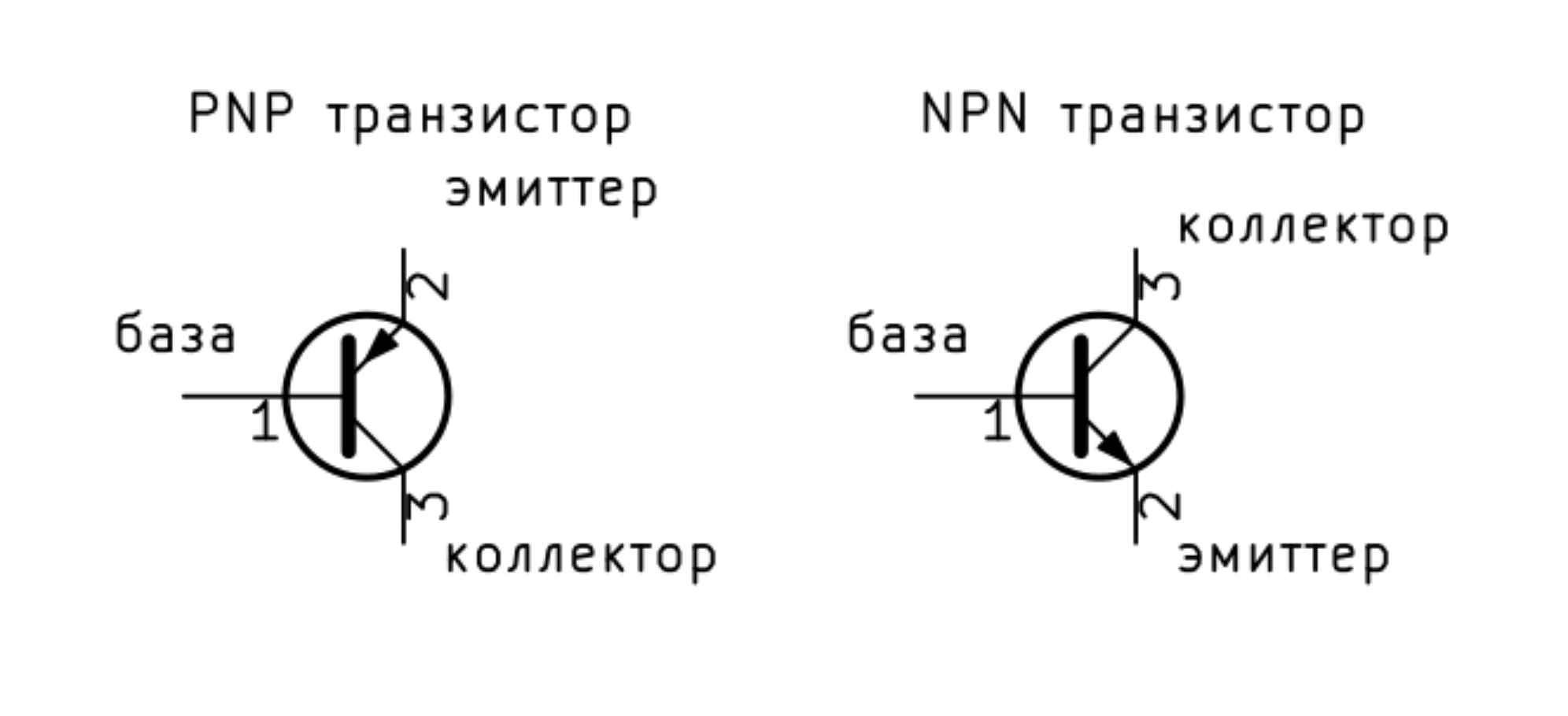
NPN a PNP
![]()
Výše popsaný tranzistor je tzv. NPN tranzistor. Nazývá se tak díky tomu, že se skládá ze tří vrstev křemíku spojených v pořadí: Negativní-Pozitivní-Negativní. Kde negativní je slitina křemíku s přebytkem negativních nosičů náboje (n-dopovaná), a pozitivní je s přebytkem pozitivních (p-dopovaná).
NPN jsou efektivnější a běžnější v průmyslu.
Tranzistory PNP jsou označeny odlišně podle směru šipky. Šipka vždy ukazuje od P do N. Tranzistory PNP se vyznačují “obráceným” chováním: proud není blokován, když je báze uzemněna, a blokována, když jí proud protéká.
FET
Tranzistory s efektem pole (FET, Field Effect Transistor) mají stejný účel, liší se však svou vnitřní strukturou. Zvláštním typem těchto součástek jsou tranzistory MOSFET (Metal-Oxide-Semiconductor Field Effect Transistor). Umožňují vám provozovat mnohem větší výkon při stejné velikosti. A ovládání samotného “tlumiče” se provádí výhradně s napětím: proud bránou na rozdíl od bipolárních tranzistorů nejde.
Tranzistory s efektem pole mají tři kontakty:
Hradlo – je na něj přivedeno napětí, aby proud mohl protékat; brána je uzemněna, aby blokovala proud.
![]()
N-kanál a P-kanál
![]()
Analogicky s bipolárními tranzistory se polní tranzistory liší polaritou. N-kanálový tranzistor byl popsán výše. Jsou nejčastější.
P-Kanál se liší ve směru šipky, když je označen, a opět má “obrácené” chování.
Připojení tranzistorů k buzení vysoce výkonných součástek
Typickým úkolem mikrokontroléru je zapínání a vypínání určité součástky obvodu. Samotný mikrokontrolér je obvykle skromný, pokud jde o manipulaci s výkonem. Takže Arduino, když je vydáno na kontakt 5 V, vydrží proud 40 mA. Výkonné motory nebo supersvítivé LED diody mohou čerpat stovky miliampérů. Při přímém připojení takových zátěží může čip rychle selhat. Navíc pro výkon některých součástek je potřeba napětí větší než 5 V a Arduino z výstupního kontaktu (digitální výstupní pin) z principu nemůže vydat více než 5 V.
Ale stačí jednoduše ovládat tranzistor, který zase bude ovládat velký proud. Řekněme, že potřebujeme připojit dlouhý LED pásek, který vyžaduje 12V a stále odebírá 100mA:
![]()
Nyní, když je výstup nastaven na logickou jedničku (high), 5 V vstupujících do báze otevře tranzistor a páskou poteče proud – bude svítit. Když je výstup nastaven na logickou nulu (nízká), základna bude uzemněna přes mikrokontrolér a tok proudu bude blokován.
Dávejte pozor na odpor omezující proud R. Je nutné, aby při přiložení řídicího napětí nevznikl zkrat na trase mikrokontrolér – tranzistor – zem. Hlavní věcí není překročit přípustný proud přes kontakt Arduino 40 mA, takže musíte použít rezistor s hodnocením alespoň:

to je způsobeno skutečností, že hradlo v takových tranzistorech je řízeno výhradně napětím: v sekci mikrokontrolér-brána-zdroj není žádný proud. A díky vysokému výkonu umožňuje obvod MOSFET řídit velmi výkonné komponenty.
Pokud není uvedeno jinak, je obsah této wiki licencován pod následující licencí: CC Attribution-Nonkomerční-Share Alike 4.0 International
V dnešním digitálním světě mikrokontroléry často potřebují provádět některé akce ve fyzickém světě lidí pomocí různých mechanických, optických, akustických a dalších externích zařízení. Tranzistory jsou navrženy tak, aby koordinovaly mikrokontrolér s akčními členy. V článku se budeme zabývat použitím bipolárních tranzistorů v klíčových režimech.
Bipolární tranzistor je v podstatě proudové zařízení; řídí proud a řídí proud. Podle typu vodivosti jsou bipolární tranzistory typu pnp a npn.
Nejčastěji používaný propojovací obvod je se společným emitorem. V tomto obvodu je řízení dodáváno do základny přes odpor omezující proud vzhledem k emitoru. Zátěž je připojena ke kolektorovému okruhu.
LED ovládací obvod s provozním proudem 50 mA
LED s provozním proudem 50 mA nelze ovládat přímo z mikrokontroléru, protože přípustný výstupní proud z pinu je obvykle omezen na 10 mA – 20 mA.
Potřebujeme například zapnout/vypnout infračervenou LED BL-L513IRBC, pomocí které plánujeme ovládat klimatizaci.
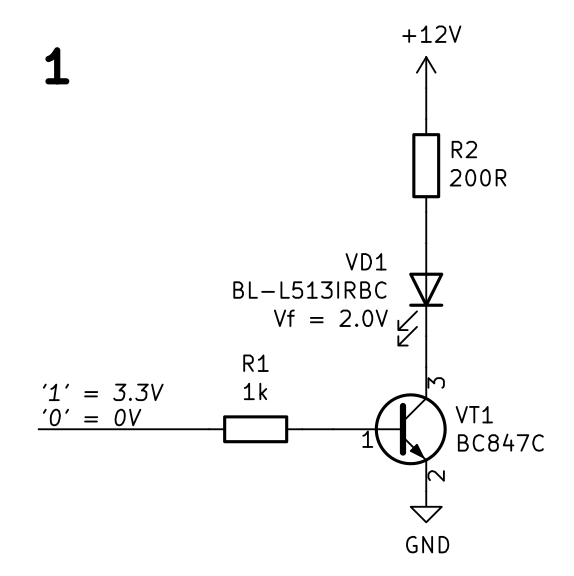
Rezistor R1 nastavuje proud báze tranzistoru při zapnutí a vypnutí. Tranzistor BC847C je dost nízkopříkonový a při proudu 50 mA na kolektoru v saturačním režimu klesne asi o 200 mV. Úbytek na LED bude 2.0 V. Rezistor R2 musí být zvolen tak, aby proud procházející LED byl 50 mA. Při napájení 12 V a celkovém úbytku napětí na tranzistoru a LED 2.2 V bude mít rezistor napětí 9.8 V. Pro získání proudu 50 mA musí být odpor rezistoru R2 196 Ohmů.
Pokud vezmete výkonnější tranzistor, například BC817-25, bude jeho saturační napětí kolektoru nižší, asi 40 mV při kolektorovém proudu 50 mA, ale výkonnější tranzistory mají zpravidla nižší zisk.
Při napájení kolektorového obvodu z 12 V můžeme zapojit více LED do série a ovládat je současně (např. pro zvětšení pracovního rozsahu naší ústředny) odpovídajícím přepočtem proud omezujícího rezistoru R2.
Jak vybrat rezistor v bázi tranzistoru? Tranzistor BC847C má koeficient přenosu proudu hFE = 400 – 800. V lineárním režimu to bude znamenat, že základní proud (řídicí proud) je mnohonásobně menší než kolektorový proud (řízený proud). Protože náš obvod pracuje ve spínacím režimu, je potřeba základní proud nastavit více. Čím vyšší je proud báze, tím rychleji se tranzistor zapne. Faktor, o kolik základní proud překročí minimum, se nazývá faktor saturace. Minimální proud báze (s koeficientem nasycení jedna), který zcela otevře tranzistor, bude 50 mA / 400 = 0.125 mA. Protože se charakteristiky tranzistoru mění v čase, se změnami teploty, se změnami kolektorového proudu, od šarže k šarži, od různých výrobců, správným řešením by bylo nastavit koeficient saturace větší než jedna, jinak může nastat situace v kterým se tranzistor úplně neotevře a obvod nebude fungovat to není pravda. Horní hodnota proudu báze je omezena buď maximálním proudem báze dle dokumentace k tranzistoru, nebo maximálním přípustným proudem, který může výstup mikrokontroléru vyprodukovat. Mějme maximální proud báze 10 mA.
Vypočítejme základní rezistor pro obvod na obrázku 1. Napětí na bázi při saturaci je uvažováno 0.7 V. Při napájení mikrokontroléru 3.3 V bude mít základní rezistor napětí 2.6 V. Minimální proud báze 0.125 mA zajistí odpor 20800 Ohmů. Maximální proud báze 10 mA zajistí odpor 260 ohmů. V tomto případě máme poměrně širokou škálu možností odporu; můžeme vzít 1 kOhm.
Uvažujme obvod s jinou zátěží
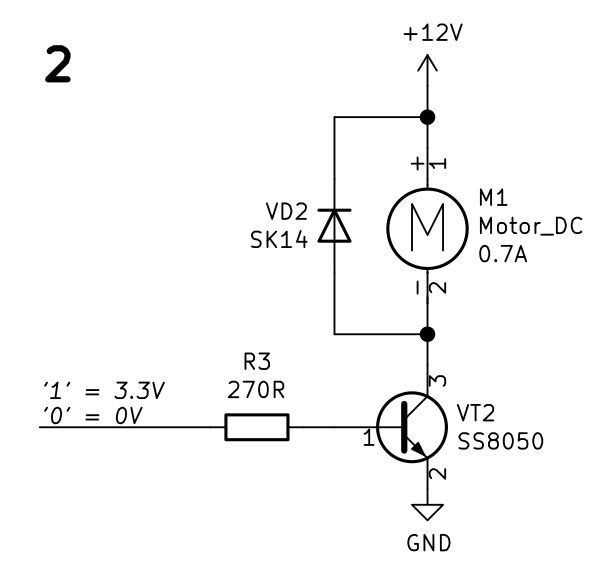
Motor potřebujeme zapnout provozním proudem 0.7 A. K jeho zapnutí potřebujeme výkonnější tranzistor. Vezměme si tranzistor SS8050 s maximálním povoleným kolektorovým proudem 1.5 A. Tento tranzistor má minimální převodový poměr proudu 120. Při kolektorovém proudu 0.7 A potřebujeme zajistit minimální proud báze 5.8 mA. Vezmeme-li v úvahu skutečnost, že je nutné implementovat koeficient saturace větší než jedna, zbývá nám pracovní varianta pro základní proud 10 mA. Při daném kolektorovém proudu 0.7 A bude základní saturační napětí tohoto tranzistoru asi 1.2 V (dle dokumentace k tranzistoru). Napětí na základním rezistoru je 2.1 V. Minimální odpor základního rezistoru je 2.1 V / 0.010 A = 210 Ohmů. Maximální odpor základního odporu je 2.1 V / 0.0058 A = 360 Ohmů. Pokud dodáme základní rezistor větší než 360 Ohmů, tranzistor se zjevně zcela neotevře a nebude poskytovat výstupní proud 0.7 A.
Při kolektorovém proudu 0.7 A bude saturační napětí kolektoru asi 0.2 V. Výkon rozptýlený na kolektoru tranzistoru bude asi 0.14 W a tranzistor bude znatelně teplý.
Dodatečně podotýkám, že stejnosměrný elektromotor je indukční zátěž a je nutné s ním paralelně instalovat ochrannou diodu, která při vypnutí tranzistoru ochrání tranzistor před samoindukcí EMF. Jmenovitý proud této diody musí být roven nebo větší než provozní proud indukční zátěže. Provozní napětí diody musí být větší než napájecí napětí zátěže.
Je třeba uvést důležitý bod. Čím větší je proud báze, tím rychleji se tranzistor zapíná, tím větší je koeficient saturace. Čím vyšší je saturační koeficient, tím pomaleji se bude tranzistor vypínat. Zpoždění vypnutí může dosáhnout několika stovek nanosekund. Na první pohled se tato hodnota zdá příliš malá na to, abychom jí věnovali pozornost. Ve skutečnosti, pokud ovládáte proud zátěží pomocí PWM nebo se pokusíte zvýšit rychlost přenosu dat přes infračervený kanál, zjistíte, že zpoždění při vypnutí tranzistoru značně zkreslí signál.
Vezměme například frekvenci PWM 20 kHz s rozlišením 8 bitů. Perioda PWM bude 50 mikrosekund, rozlišení jednoho kroku bude asi 200 nanosekund. Zpoždění vypnutí tranzistoru o 400 nanosekund pohltí rozlišení dvou nejméně významných bitů a z 8bitového rozlišení zůstane pouze 6 bitů dynamického rozsahu.
Chcete-li zvýšit rychlost vypínání tranzistoru, existují metody, které zvážíme později.
Uvažujme další obvod, který má řadu zajímavých vlastností

Tento obvod je také společným emitorem. V obvodu báze není žádný odpor a proud báze je nastaven odporem rezistoru v obvodu emitoru. Tímto rezistorem protéká základní proud a kolektorový proud (řídící proud a proud zátěže). Výsledkem je negativní zpětná vazba: se zvyšujícím se zatěžovacím proudem se zvýší proud procházející emitorovým rezistorem a současně se zvýší úbytek napětí na emitorovém rezistoru. Vzhledem k tomu, že napětí na bázi je pevné, 3.3 V, pak se zvýšením napětí na emitorovém rezistoru bude napětí na emitorovém přechodu tranzistoru klesat, zatímco proud báze bude klesat a tranzistor se vypne. Tím se stabilizuje emitorový proud tranzistoru. Protože základní proud je faktorem několikanásobně menší než kolektorový proud, jeho vliv na napětí emitorového rezistoru je nevýznamný a při první aproximaci jej lze ve výpočtu ignorovat a lze předpokládat, že emitorový proud se přibližně rovná kolektorovému proudu.
Odpor emitorového rezistoru lze poměrně snadno vypočítat. Při řídicím napětí 3.3 V a úbytku na přechodu emitoru 0.7 V je napětí na rezistoru emitoru 2.6 V. Při cílovém zatěžovacím proudu 50 mA by měl být odpor rezistoru emitoru asi 52 Ohmů.
Tento obvod umožňuje stabilizovat proud zátěže, to znamená, že když se změní napájecí napětí zátěže (nebo když se změní odpor zátěže), proud zátěží zůstane konstantní. Můžeme nainstalovat jednu LED, dvě nebo tři, ale emitorový odpor se nebude muset měnit a proud procházející LED bude stejný. Je třeba poznamenat, že v tomto obvodu přepětí klesne na tranzistoru a je třeba vzít v úvahu výkon rozptýlený tranzistorem.
Tranzistor v tomto obvodu pracuje v lineárním režimu a nevstupuje do saturace. To umožňuje tranzistoru se rychle zapnout a rychle uzavřít.
Tento obvod má pouze jeden odpor namísto dvou, což může být také důležité v praktických aplikacích.
Je důležité, aby základní řídicí napětí bylo stabilní, protože je to referenční pro stabilizaci proudu.
Pro napájení kolektorového obvodu tohoto obvodu je zapotřebí větší napětí, než je napětí řídicího signálu.
Způsoby, jak zkrátit dobu vypínání tranzistoru
Pokud máme základní rezistor a tranzistor ovládáme z výstupu mikrokontroléru napájením 3.3 V, tak to dopadne tak, že tranzistor zapneme proudem 3.3 V a tranzistor vypneme proudem přes stejný odpor, ale s proudem 0.7 V, to znamená, že proud báze vypíná tranzistor bude menší.
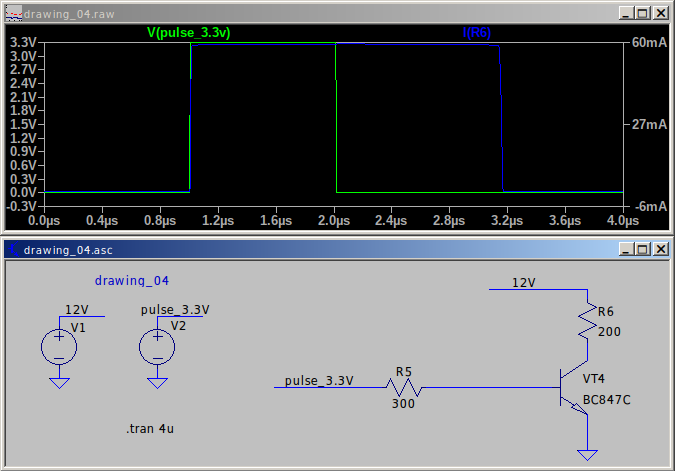
To je jeden z důvodů, proč se tranzistor vypíná pomaleji. Pro zvýšení vypínací rychlosti tranzistoru můžeme použít následující obvod.
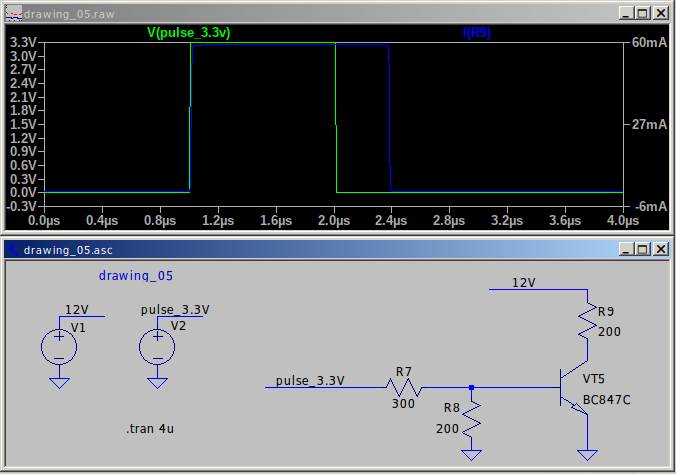
V obvodu na obrázku 5, když je vypnutý, když se výstupní signál z mikrokontroléru rovná 0 V, ukáže se, že oba odpory 300 Ohmů a 200 Ohmů jsou zapojeny paralelně a celkový odpor se zmenší, což vede k zvýšení proudu báze tranzistoru při vypnutí. Tím se zvýší rychlost vypínání tranzistoru.
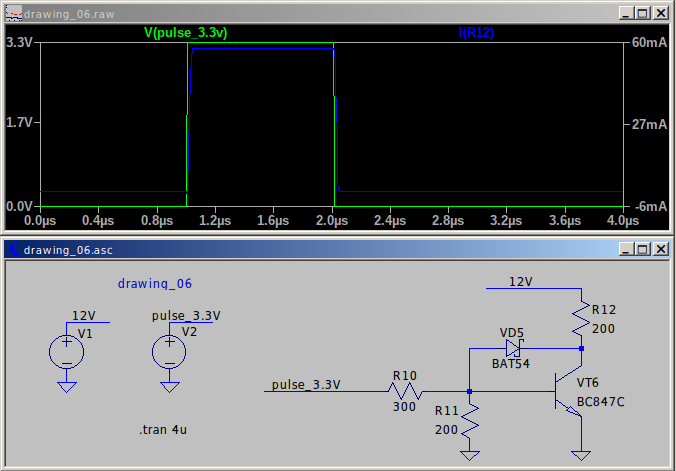
Dalším způsobem, jak zvýšit rychlost vypínání tranzistoru, je snížit hloubku saturace tranzistoru při zapnutí. Dioda připojená od základny ke kolektoru sníží hloubku nasycení. Na začátku sepnutí je na kolektoru vysoké napětí, dioda se sepne a přes emitorový přechod tranzistoru protéká veškerý proud bázového rezistoru. Když napětí kolektoru klesne pod napětí báze, začne tato dioda odklánět přechod emitoru a část proudu základního rezistoru bude protékat diodou, zatímco proud přechodem emitoru se sníží a tím se sníží hloubka saturace přechodu. tranzistor.
Kaskáda pro zvýšení výstupního proudu na bipolárních tranzistorech.
Tento obvod umožňuje zvýšit výstupní proud. Jedná se o polomůstkový obvod. Využívá dva tranzistory různé vodivosti, komplementární pár tranzistorů. Oba tranzistory, horní i dolní, jsou v tomto zapojení zapojeny podle obvodu se společným kolektorem. Zapojení se společným kolektorem má takovou vlastnost, že výstupní napětí nemůže být větší než vstupní napětí a proud se zvyšuje.

Při stavbě polovičního můstku pomocí tranzistorů s efektem pole je třeba speciálním způsobem navrhnout řídicí obvod, a pokud jsou oba tranzistory řízeny ze stejného signálu, pak v okamžiku sepnutí poteče z výkonu průchozí proud. napájení do země, protože jeden tranzistor se již zapnul a druhý ještě nevypnul.
Špatná věc na průchozím proudu je, že zvýší spotřebu; přes proud vytvoří silné rušení a může poškodit tranzistory. Aby se to eliminovalo, používají se dva signály k ovládání polovičního můstku tranzistorů s efektem pole, do jednoho tranzistoru je odeslán vypínací signál, poté pauza, zatímco se tranzistor vypne (mrtvý čas), poté je odeslán signál do zapněte druhý tranzistor. Tento způsob značně komplikuje řídicí obvod a vyžaduje dva různé řídicí signály. Polomůstkový obvod využívající bipolární tranzistory spojené se společným emitorem také vyžaduje mrtvý čas při přepínání na eliminaci průchozího proudu.
Obvod na obrázku 7 s bipolárními tranzistory zapojenými do obvodu se společným kolektorem takovou nevýhodu nemá a poloviční můstek lze ovládat jediným signálem. To znamená, že při spínání v obvodu na obrázku 7 neprotéká oběma tranzistory žádný průchozí proud.
Další výhodou tohoto obvodu je absence rezistorů.
Také tranzistory v tomto obvodu pracují bez saturace, to znamená, že se zapínají a vypínají co nejrychleji, což umožňuje použití tohoto obvodu jako zesilovače PWM.
Nevýhodou tohoto obvodu je pokles tranzistorů. Na příkladu spodního tranzistoru. Když změníme řídicí signál báze z 3.3V na 0V, začne se zapínat spodní tranzistor. V tomto případě se napětí na emitoru tranzistoru nemůže rovnat nule, protože v tomto případě nebude procházet žádný proud přes přechod emitoru k otevření tranzistoru. Minimální napětí na výstupu tohoto stupně tedy bude asi 0.7 V. U horního tranzistoru je situace podobná, maximální napětí na výstupu stupně nemůže být větší než napájecí napětí mínus 0.7 V.
Jak používat proudový zesilovací stupeň
Pokud vezmete dva takové poloviční můstky s napájením rovným napájecímu napětí mikrokontroléru, udělejte PWM signál a jeho inverzi (buď samostatným měničem nebo výstupní konfigurací v mikrokontroléru) a přiveďte každý signál na svou polovinu -most, získáte poměrně výkonný zesilovač např. pro generování zvuku.

Při napájení zesilovače z 3.3 V bude kolísání výstupního napětí 3.3 V – 2 * 0.7 V = 1.9 V. Při použití dynamické hlavy s odporem 4 Ohmy bude proud přes ni asi 0.4 A a max. výkon při zátěži bude o něco více než půl wattu. Což je u tak jednoduchého PWM zesilovače docela dobré. Napájení tohoto zesilovacího obvodu musí být řádně filtrováno, protože jakákoli změna napájecího napětí se projeví ve změně proudu zátěží.
Při použití mikrokontroléru s napájením 5 V můžete také zvýšit napájecí napětí zesilovače na 5 V a výstupní výkon při zátěži 4 Ohm bude asi 3 W. V tomto případě je třeba vzít tranzistory s velkým přípustným kolektorovým proudem, například komplementární pár SS8550 (pnp) a SS8050 (npn), umožňují kolektorový proud až 1.5 A, tranzistory budou muset být dodatečně ochlazené.
Stejný obvod lze použít pro řízení komutátorových motorů pomocí PWM. Obvod umožňuje změnu směru otáčení elektromotoru. Při použití vyššího napájecího napětí pro tento proudový zesilovač je nutné zvýšit i napětí řídicího signálu.

Pro přivedení úrovně řídicího signálu z 3.3 V na 15 V se používá tranzistor.
V tomto obvodu je k ovládání každého polovičního můstku použit logický čip 4069 (CD4069UB). Tento mikroobvod má šest logických invertorů, mikroobvod lze napájet od 3 V do 18 V. Pro ovládání můstku je nutné napájet tento mikroobvod ze stejného napájecího napětí jako můstek. Stejný čip se používá pro generování inverzního signálu pro druhý poloviční můstek. Aby bylo možné do zátěže dodat maximální napětí 12 V, s přihlédnutím k poklesu na tranzistorech, napájecí napětí můstku se zvýší na 15 V. Tento obvod implementuje režim řízení proudu s rychlým útlumem zátěže. Pro implementaci režimu pomalého doznívání je vyžadováno samostatné řízení pro každý poloviční můstek.
Pro zjednodušení pochopení článek pojednává pouze o hlavních parametrech a charakteristiky skutečných kaskád se budou mírně lišit. Všechny obvody uvedené v článku jsou modelovány v LTspice
















