Když se mluví o elektromotorech, lidé si často pletou stejnosměrné motory a střídavé motory.
Nejviditelnější rozdíl mezi těmito dvěma typy elektromotorů je typ proudu, který každý přeměňuje na mechanickou energii: stejnosměrné motory přeměňují stejnosměrný proud a střídavé motory přeměňují střídavý proud. Kromě tohoto zásadního rozdílu však existuje mnoho dalších rozdílů mezi stejnosměrnými motory a střídavými motory.
Co je stejnosměrný motor?
Stejnosměrný motor je typ elektromotoru, který v podstatě přeměňuje stejnosměrnou elektrickou energii na rotační mechanickou energii. Toto zařízení lze také použít v opačném směru otáčením hřídele motoru pro generování stejnosměrného proudu.
Při použití tímto způsobem se stejnosměrné zařízení chová jako generátor. Existuje mnoho základních typů stejnosměrných motorů, včetně motorů s permanentními magnety a bezkomutátorových motorů.

Co je střídavý motor?
Střídavý motor je elektromechanické zařízení, které primárně přeměňuje střídavou elektrickou energii na mechanickou energii.
Tento typ motoru se vyskytuje v mnoha variantách, ale obecně je lze rozdělit do dvou hlavních skupin: synchronní motory nebo asynchronní motory. Synchronní motory zahrnují hysterezní a reluktanční motory, zatímco asynchronní motory jsou jednofázové nebo vícefázové, s kotvou nakrátko a s vinutým rotorem.

Více informací o konstrukci různých typů motorů naleznete zde:
Hlavní výhody a nevýhody stejnosměrných a střídavých motorů
Regulace otáček se stejnosměrným motorem je mnohem jednodušší ve srovnání se střídavým motorem.
Rychlost stejnosměrného motoru je řízena vstupním napětím, na rozdíl od složitého procesu řízení rychlosti střídavého motoru změnou frekvence, což vyžaduje složitý a drahý frekvenční měnič.
Existují lihové, tří a čtyřrychlostní střídavé motory, ale ty jsou schopny zajistit pouze skokové změny rychlosti otáčení, což v mnoha případech není vhodné řešení.
Pouze asynchronní motor s vinutým rotorem může zajistit plynulou změnu rychlosti otáčení střídavých motorů, ale takový motor má horší energetický výkon a vyžaduje složité řídicí obvody.
U stejnosměrného motoru je také jednodušší změnit směr otáčení – stačí přepnout polaritu napětí.
Tento typ motoru může poskytovat konstantnější a stabilnější točivý moment v různých rozsazích otáček a může obecně poskytovat rychlejší odezvu na změny zatížení ve srovnání se střídavými motory.
Se stejnosměrným servomotorem můžete přesně ovládat zrychlení a polohu. Tento přístup můžete vyzkoušet se střídavými motory, ale nedosáhnete stejné úrovně přesnosti.
Zde jsou některé další výhody stejnosměrných motorů. Relativně malá setrvačnost rotoru u stejnosměrného motoru umožňuje rychlejší zrychlení a zpomalení než u střídavého motoru.
To je hlavní důvod, proč v montážních strojích a malých a středních robotech dominují stejnosměrné motory. Očekává se, že roboti budou produktivnější než lidé. To je nemožné, pokud roboti nejsou rychlejší než lidé.
Je poměrně snadné sladit rychlost dvou stejnosměrných motorů, ale ne dvou střídavých motorů.
Točivý moment je u stejnosměrných motorů řízen přímo změnou proudu, ale u střídavých motorů pouze nepřímo.
Pokud by stejnosměrné motory měly pouze výhody oproti střídavým motorům, je nepravděpodobné, že by střídavé motory stále existovaly. Realita je však taková, že stejnosměrné motory mají oproti střídavým motorům mnoho nevýhod. Takže i toto je potřeba pochopit, abychom se mohli správně rozhodnout.
Kartáčované stejnosměrné motory vyžadují pravidelnou údržbu pro výměnu kartáčů a komutátoru, které neustále jiskří a hoří. Tyto díly jsou také citlivé na poškození prachem, což výrazně ovlivňuje spolehlivost motoru.
Čím více hodin používáte motor, tím častěji je třeba měnit kartáče a provádět údržbu komutátorů. Pro přeskočení údržby můžete použít bezkomutátorový stejnosměrný motor, ale pak zaplatíte více za samotný motor.
Na druhou stranu střídavé motory vyžadují jen malou nebo žádnou pravidelnou údržbu.
Stejnosměrný motor jednoduše nepřipojíte k žádné domácí nebo průmyslové elektrické síti. Nejprve je potřeba převést střídavé napětí na stejnosměrné napětí.
V procesu přeměny energie dochází ke ztrátám a zhoršují se kvalitativní parametry elektrické energie: zkreslení sinusoidy napájecího napětí a zvlnění napětí v elektrických vedeních.
Nyní chápete, proč naprostá většina velkých motorů na světě běží na střídavý proud.
Světová standardní elektrická infrastruktura běží na střídavý proud, nikoli na stejnosměrný proud. Standard byl definován před více než stoletím, když si inženýři uvědomili, že střídavý proud lze přenášet na velké vzdálenosti s výrazně menšími ztrátami než stejnosměrný proud.
Proto každý stejnosměrný motor vyžaduje jedinečný a specializovaný zdroj energie v podobě baterie, generátoru, usměrňovače nebo vodíkového palivového článku. To je další nevýhoda stejnosměrného motoru oproti střídavému motoru.

Na fotografii je vyvýšená část metra v New Yorku. Tato železniční trať byla postavena v roce 1904, 14 let poté, co bylo v Londýně postaveno první metro na světě.
Vysokovýkonné stejnosměrné motory používané ve vlacích newyorského metra vyžadují vyhrazenou a komplexní energetickou infrastrukturu, která distribuuje 625 voltů DC přes třetí kolejnici do vlaků.
Možná se ptáte, proč se inženýři v roce 1904 rozhodli, že má smysl používat stejnosměrný proud na železniční trati? Odpověď je jednoduchá. A spočívá v hlavní výhodě stejnosměrných motorů oproti střídavým motorům – snadné ovládání rychlosti otáčení, a tedy i rychlosti vlaku.
Vypnete napětí na stejnosměrném motoru a vlak zpomalí, zvýšíte napětí a vlak zrychlí, zabrzdíte a vlak zastaví. Inženýři v roce 1904 měli rádi jednoduchost.
A ještě jeden detail, vynález přesného řízení rychlosti střídavých motorů byl ještě několik desetiletí daleko. Inženýři tehdy neměli tolik možností.
Doufám, že vám tento článek pomohl. Podívejte se také na další články z kategorie Elektromotory a jejich aplikace
Představte si, jaký by byl moderní svět, kdyby z něj najednou zmizely všechny elektromotory. Řekněme, že jsme je nahradili tepelnými motory. Tepelné motory jsou však objemné a vypouštějí páru a výfukové plyny, zatímco elektrické motory srovnatelného výkonu jsou kompaktní, perfektně se hodí na stroje, elektrická vozidla a další zařízení a přitom jsou šetrné k životnímu prostředí, hospodárné a spolehlivé. Moderní svět si nelze představit bez elektromotorů, které lidem velmi usnadňují práci, zkrátka zpříjemňují náš život.

Díky elektromotorům získáváme mechanickou energii z elektrické energie. A rozhodující význam v tomto procesu mají hmotnostní a rozměrové charakteristiky, výkon a počet otáček za minutu, které jsou zase spojeny jak s konstrukčními vlastnostmi motorů, tak s parametry napájecího napětí.
Podle typu napájecího napětí mohou být elektromotory buď střídavé nebo stejnosměrné. Způsobem řízení: krokový, lineární, servo (sledovač). Střídavé motory jsou zase asynchronní a synchronní. Podívejme se na typy elektromotorů, povšimněme si jejich vlastností a promluvme si o principech fungování každého z nich.
Po elektřině jsem se úplně vzdal zájmu o přírodu. Nevylepšená věc.
Vladimir Vladimirovič Mayakovsky
Obsah článku
DC motory
Pro stavbu elektrických pohonů s vysokými dynamickými charakteristikami se používají stejnosměrné elektromotory. Vyznačují se vysokou přetížitelností a rovnoměrným otáčením. Stejnosměrné motory se často používají v elektrických vozidlech. Jsou také vybaveny mnoha stroji, stroji, jednotkami, včetně domácích spotřebičů.

Činnost stejnosměrných elektromotorů je založena na principu interakce proudů procházejících vodiči kotvy se stacionárním magnetickým tokem vytvořeným budícím vinutím pólů.
Činnost klasického stejnosměrného motoru je založena na rotaci rámu proudem ve vnějším magnetickém poli: proud je do rámu přiváděn přes sestavu kartáč-kolektor a magnetické pole statoru je získáváno buď z permanentních magnetů, popř. ze stejného stejnosměrného proudu (magnetické pole cívky s proudem) . V důsledku toho se rám s proudem otáčí v magnetickém poli. Místo rámu může být cívka s proudem na magnetickém obvodu – rotor (kotva stejnosměrného motoru).
Pomocí rezistorů připojených k obvodu kotvy motoru s nezávislým buzením je možné získat požadovaný rozběhový proud a rozběhový moment a regulovat (snižovat) otáčky kotvy při zatížení hřídele. Snížením napětí na kotvě pomocí regulátoru můžete také získat požadovaný rozběhový moment a regulovat otáčky dolů od hlavního, tedy snížit.
Díky těmto vlastnostem se takto nezávisle buzené stejnosměrné motory používají tam, kde je potřeba plynulé regulace otáček v širokém rozsahu, například u obráběcích strojů.
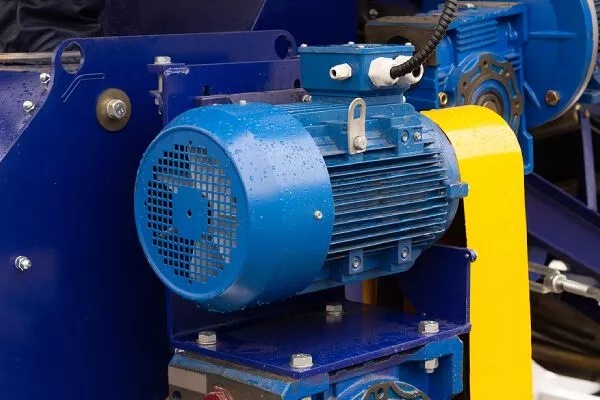
AC motory

Střídavé elektromotory jsou velmi široce používány v každodenním životě a v průmyslu, protože jsou považovány za univerzálnější ve srovnání se stejnosměrnými motory. Střídavé motory mají jednoduchou konstrukci, jsou spolehlivější než stejnosměrné motory a snadno se s nimi manipuluje.
Například většina domácích ventilátorů a průmyslových digestoří je vybavena střídavými asynchronními motory. Jsou také vybaveny navijáky, čerpadly a obráběcími stroji. Jednoduchost průmyslových střídavých motorů spočívá v absenci sestavy kartáč-komutátor a složité elektroniky.
Pokud jde o bezpečnost a spolehlivost třífázových střídavých indukčních motorů, zejména v průmyslovém prostředí, je důležité vědět, jak zabránit poškození vinutí při přerušení jedné z fází. To je možné díky opatřením podrobně popsaným v článku Zvýšení spolehlivosti třífázových motorů.
Krokové motory

Krokové motory fungují tak, že převádějí diskrétní stejnosměrné elektrické impulsy na mechanické pohyby (kroky). Kancelářské vybavení, obráběcí stroje, roboty – všude tam, kde je vyžadována vysoká rychlost a rovnoměrný pohyb pracovního tělesa, se dnes používají krokové motory. Pro řízení rychlosti otáčení rotoru elektronická jednotka reguluje frekvenci opakování pulzů a jejich pracovní cyklus. Krokový motor je synchronní bezkomutátorový stejnosměrný motor.
Příklady použití krokových motorů:
Servopohony (servomotory)

Servopohon (následný pohon) je high-tech DC motor. Na rozdíl od krokového motoru má servomotor ve své konstrukci také snímač polohy rotoru, pomocí kterého je implementován mechanismus negativní zpětné vazby.
Motory tohoto typu jsou schopny vyvinout vysoké otáčky a výkon, jako stejnosměrné krokové motory, ale nastavení polohy pracovního prvku je přesnější. Pro CNC stroje je servopohon přesně to, co potřebujete. Mnoho moderních průmyslových strojů je vybaveno servopohony integrovanými do vysoce přesného počítačového řídicího systému.
Lineární motory
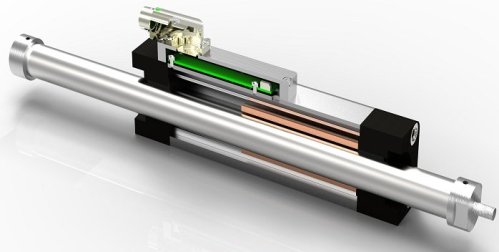
Místo rotoru má lineární stejnosměrný motor tyč (tyč) s magnety, která se lineárně pohybuje statorem vzhledem k induktoru. Motory tohoto typu získávají na oblibě jako pohony pro mechanismy s vratnými pohyby za provozu.
Jedná se o spolehlivé a ekonomické řešení, které eliminuje potřebu použití jakékoli mechanické převodovky. Do cívky jsou vysílány impulsy požadované polarity a trvání, vytvářející magnetické pole požadované konfigurace, které následně působí na tyč, a aktuální poloha tyče je monitorována díky Hallovým senzorům zabudovaným ve statoru.
Asynchronní motory
Nejčastěji je asynchronní motor střídavý motor, ve kterém se frekvence (nebo úhlová rychlost) otáčení rotoru liší od úhlové rychlosti magnetického toku statoru. To znamená, že v takovém motoru dochází k „prokluzu“. Asynchronní střídavé motory jsou k dispozici s rotorem nakrátko nebo vinutým rotorem.
Výkonnější asynchronní motory jsou vyráběny s vinutým rotorem, velikost magnetického toku takového rotoru je řízena reostatem a rychlost otáčení je nastavitelná. Méně kritické (v závislosti na rychlosti rotoru na zatížení) zařízení je vybaveno asynchronními motory s rotorem nakrátko.
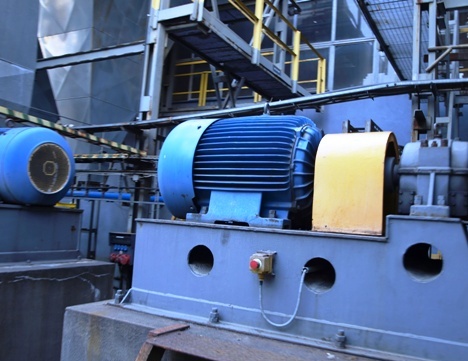
Třífázové asynchronní AC motory jsou nejběžnější v průmyslu kvůli jejich snadné údržbě, spolehlivosti a nízké ceně.
Jednofázové asynchronní elektromotory Mají rotor s kotvou nakrátko a dvě vinutí ve statoru, vzájemně posunutá o 90°. Jedno vinutí funguje. Při chodu elektromotoru je toto vinutí neustále napájeno z jednofázové sítě střídavého proudu.
Druhé vinutí je spouštěcí vinutí a je připojeno po dobu rozběhu k vytvoření rozběhového momentu. Je vyroben z drátu s menším průřezem a jeho aktivní odpor je větší než u pracovního vinutí.
Když rotor motoru dosáhne dostatečné rychlosti, startovací vinutí se vypne. To se děje automaticky při působení proudového relé nebo speciálního spouštěče.
Nejlepší startovací vlastnosti má elektromotor s kondenzátorem v obvodu startovacího vinutí. V tomto případě je proud ve startovacím vinutí fázově posunut o úhel blízký 90°, což zajišťuje dostatečný rozběhový moment.
V pracovní části jsou mechanické charakteristiky jednofázového asynchronního elektromotoru shodné s mechanickými charakteristikami třífázového asynchronního elektromotoru. Účinnost jednofázových elektromotorů je menší než u třífázových, proto se jednofázové motory vyrábějí se jmenovitým výkonem nejvýše 0,6 kW.
Na stejný výkon se vyrábějí jednofázové komutátorové motory, které mohou pracovat jak ze střídavé sítě, tak ze zdroje stejnosměrného napětí, proto se jim říká univerzální komutátorové motory.
V podstatě se jedná o motory se sekvenčním buzením, vyznačující se tím, že jejich magnetický obvod je laminovaný a jsou uzpůsobeny pro práci s pulzujícím magnetickým tokem. V případě napájení ze zdroje střídavého napětí 50 Hz mění proud a magnetický tok současně směr, a proto se moment ukazuje jako pulzující s frekvencí 100 Hz.
Tyto elektromotory mají vlastnosti sériově vinutých motorů. Používají se jako asynchronní jednofázové elektromotory v elektrickém nářadí, domácích mechanismech a dalších strojích s nízkým výkonem.
Výběr článků o asynchronních motorech:
Synchronní elektromotory

Když mluvíme o „synchronním motoru“, tradičně znamenají střídavý motor, ve kterém se rychlost otáčení (nebo úhlová rychlost) rotoru rovná úhlové rychlosti magnetického toku v dutině statoru. Nejčastěji mluvíme o motorech, jejichž rotory nesou permanentní magnety nebo budicí vinutí, které vytváří silné vlastní magnetické pole, které zabraňuje prokluzování.
Synchronní třífázové elektromotory se od asynchronních liší tím, že jejich rotorem je elektromagnet, jehož vinutími prochází stejnosměrný proud. Takový elektromotor má tu vlastnost, že udržuje přísně konstantní rychlost otáčení, která se rovná frekvenci otáčení magnetického pole vytvářeného třífázovým statorovým vinutím.
Synchronní motor má navíc vysoký účiník. Úpravou budícího proudu je možné udržet účiník rovný jednotce. U synchronního elektromotoru nedochází k žádným ztrátám spojeným s prokluzem, takže i jejich účinnost je větší než u asynchronních.
U synchronních motorů jsou proto otáčky rotoru konstantní. Výkonné ventilátory, pohony jeřábů, pohony čerpadel – v mnoha aplikacích, kde je vyžadován vysoký výkon a konstantní otáčky bez ohledu na zatížení, se používají synchronní motory.
Vždy je užitečné vědět, jaké důvody mohou vést k poruchám v elektromotorech. Naše zjištění výzkumu o nejčastějších poruchách jeřábových motorů to odhalí.
Pokud jde o opravy elektromotorů, je důležité vědět, jak zajistit spolehlivou obnovu zařízení. Naši odborníci hovoří o nejlepších metodách opravy asynchronních motorů v našem článku. Postupujte podle odkazu a zjistěte, jaké kroky byste měli podniknout pro účinnou opravu: Oprava indukčních motorů: tajemství profesionálů
Doufám, že vám byl tento článek užitečný. Podívejte se také na další články z kategorie Elektrické přístroje a přístroje, Elektromotory a jejich aplikace
















