V usměrňovačích se tyristory používají jako řízené spínače. Pro otevření tyristoru musí být splněny dvě podmínky:
• anodový potenciál musí převyšovat katodový potenciál;
• na řídicí elektrodu musí být aplikován otevírací (řídicí) impuls.
Okamžik, kdy se mezi anodou a katodou tyristoru objeví kladné napětí, se nazývá okamžik přirozeného otevření. Přívod otevíracího impulsu může být zpožděn vzhledem k okamžiku přirozeného otevření o úhel otevření. V důsledku toho se zpožďuje začátek toku proudu tyristorem, který vstupuje do provozu, a reguluje se napětí usměrňovače.
K ovládání tyristorů usměrňovače se používá pulzně fázový řídicí systém (PPCS), který plní následující funkce:
• stanovení momentů, ve kterých by se měly otevřít určité specifické tyristory; tyto časové okamžiky jsou nastaveny řídicím signálem, který přichází z výstupu ACS na vstup SIFU;
• vytváření otevíracích impulsů vysílaných v požadovaných časech na řídicí elektrody tyristorů s požadovanou amplitudou, výkonem a dobou trvání.
Podle způsobu získání posunu otevíracích impulsů vzhledem k bodu přirozeného otevírání se rozlišují horizontální, vertikální a integrační principy řízení.
Při horizontálním řízení (obr. 2.28) se řídicí střídavé sinusové napětí uу fázově (horizontálně) posouvá vzhledem k napětí u1 napájejícímu usměrňovač. V okamžiku času φt = α se z řídicího napětí tvoří pravoúhlé odblokovací impulsy UGT Horizontální řízení se u elektropohonů prakticky nepoužívá, což je způsobeno omezeným rozsahem ovládání úhlu α (asi 120°).
Při vertikálním řízení (obr. 2.29) je okamžik přísunu otevíracích impulsů určen, když se řídicí napětí uу (tvarově konstantní) rovná proměnnému referenčnímu napětí upil (vertikálně). V okamžiku napěťové rovnosti se tvoří obdélníkové pulzy UGT.
Při integrační regulaci (obr. 2.30) je okamžik přísunu otevíracích impulsů určen, když je střídavé řídicí napětí uу rovno konstantnímu referenčnímu napětí Uon. V okamžiku napěťové rovnosti se tvoří obdélníkové impulsy UGT.

Rýže. 2,28. Princip horizontálního ovládání

Rýže. 2.29. Princip vertikálního řízení

Rýže. 2.30. Princip integrovaného ovládání
Podle způsobu měření úhlu otevření α se SIFU dělí na vícekanálové a jednokanálové. U vícekanálových SIFU se úhel α pro každý tyristor usměrňovače měří v jeho vlastním kanálu, u jednokanálových – v jednom kanálu pro všechny tyristory. V průmyslových elektrických pohonech se používají převážně vícekanálové SIFU s vertikálním principem řízení.
1. Princip regulace usměrněného napětí v řízených usměrňovačích.
U řízených usměrňovačů je proces usměrnění kombinován s regulací napětí. Jako hlavní prvek používají řízené ventily – tyristory.
Podmínky otevření tyristoru:
Tyristor se uzavře, když je přivedeno zpětné napětí nebo proud přes tyristor klesne na hodnotu blízkou nule. Po otevření tyristoru ztrácí řídicí elektroda svou funkci.
Pokud je na tyristor přivedeno napětí ze sekundárního vinutí (kladný půlcyklus), pak bude tyristor uzavřen, dokud nebude na řídicí elektrodu přiveden impuls. Jakmile k tomu dojde, tyristor se otevře a funguje jako běžný ventil.

^ Obrázek 1. Princip horizontální regulace.
Doba od začátku půlcyklu do otevření tyristoru se nazývá regulační úhel α. Je-li α = 0, pak je činnost usměrňovače podobná činnosti neřízeného usměrňovače. Čím později se řízený puls objeví od začátku půlcyklu, čím později se tyristor otevře, tím větší je řídicí úhel α, čím menší je plocha rektifikovaného napěťového pulsu, tím menší je průměrná hodnota rektifikovaného napětí.
Průměrná hodnota usměrněného napětí může být určena vzorcem pro libovolný úhel regulace: Uo = Uoα=0 • (1 + cosα) / 2
Změnou doby výskytu řídicího impulsu tedy měníme řídicí úhel, a tedy průměrnou hodnotu usměrněného napětí.
^ 2. Způsoby řízení tyristorů (Nezávislá práce):
Horizontální metoda řízení;
Vertikální metoda řízení;
Existují dva způsoby, jak změnit úhel nastavení:
Horizontální způsob řízení se tak nazývá proto, že pomocí zařízení s fázovým posunem se řídící impulsy posouvají horizontálně (podél časové osy).
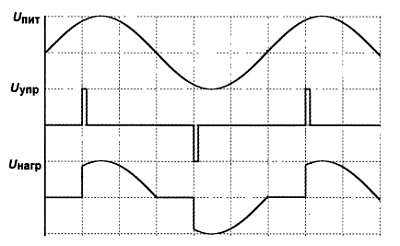
Vertikální metoda řízení. Při tomto způsobu řízení se řídicí impuls objeví, když se lineárně rostoucí napětí (pilový zub) rovná nějakému konstantnímu napětí (které lze změnit).
Předpokládejme, že konstantní napětí je Un, pak se v čase 1 pilové napětí rovná Un1:

Obrázek 2. Princip vertikální regulace.
V tomto okamžiku bude generován řídící impuls 1. Úhel řízení je roven α1. Pokud se Un zvýší na hodnotu Un2, pak pilové napětí později dosáhne této hodnoty, proto se později (v okamžiku 2) objeví řídicí impuls, v tomto případě se regulační úhel zvětší.
Druhý případ je přesnější (stabilnější α), ale také složitější. Výhodou regulace napětí jsou extrémně nízké ztráty, nevýhodou je však zvýšené zvlnění, zejména při velkých úhlech regulace
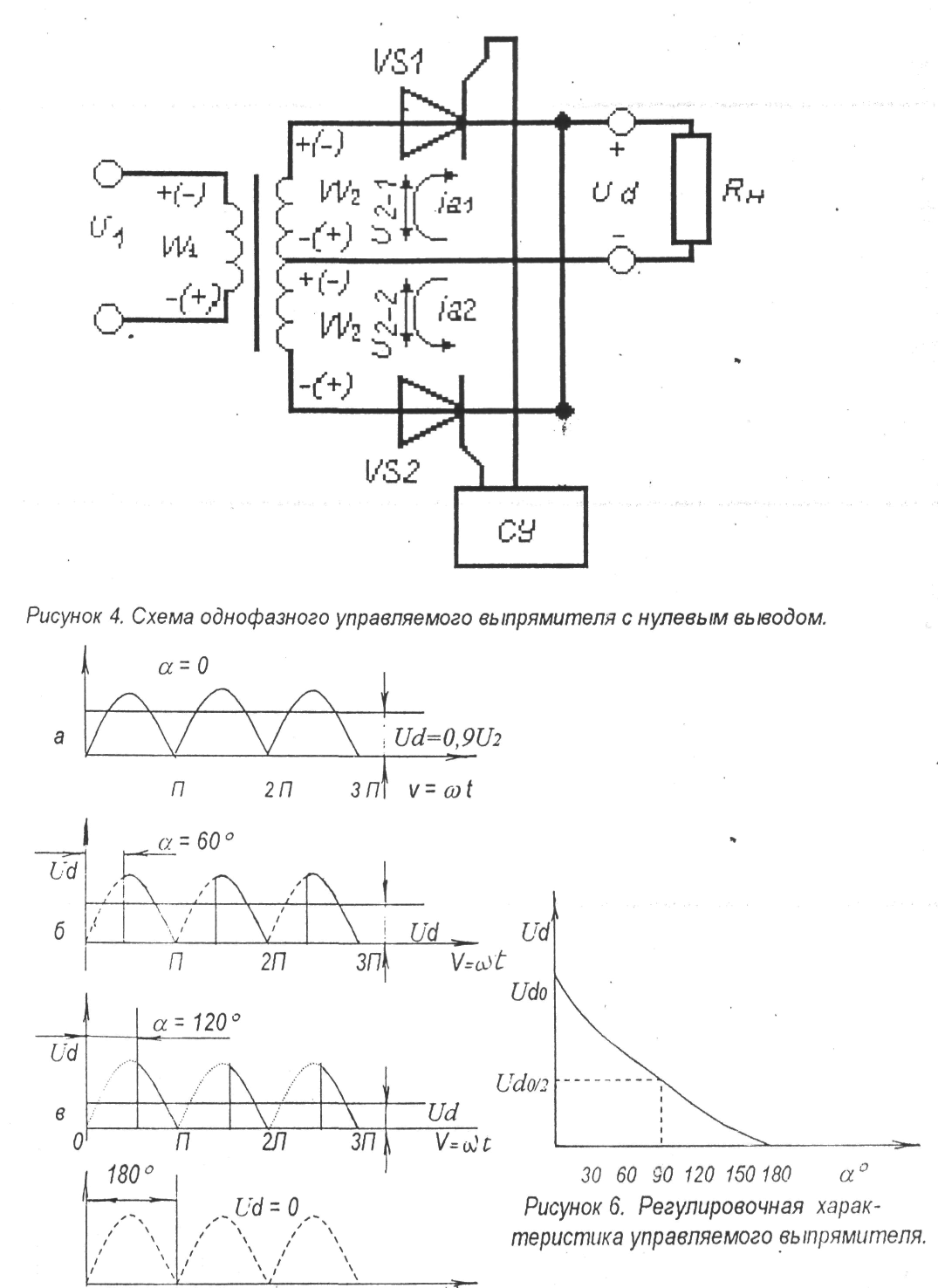
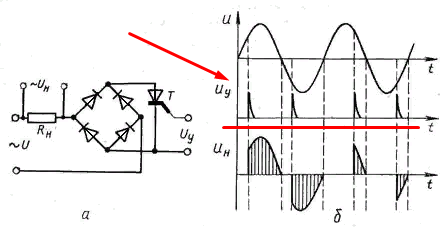
^ Princip činnosti jednofázového řízeného usměrňovacího obvodu s nulovou svorkou.
Pro regulaci napětí na zátěži se široce používá fázová metoda, založená na časovém řízení okamžiku odblokování usměrňovacích diod. Je založen na použití řízených diod – tyristorů – v obvodu usměrňovače, a proto se usměrňovač nazývá řízený.
Uvažujme princip činnosti jednofázového řízeného usměrňovacího obvodu s nulovou svorkou (obr. 4), pracujícího na aktivní zátěži.
Na vstupu usměrňovače nechejte působit kladnou půlvlnu síťového napětí U1, která odpovídá polaritě napětí na vinutí transformátoru znázorněné na Obr. 4 bez závorek. V intervalu O-vd jsou tyristory VS1, VS2 sepnuté, napětí na výstupu usměrňovače je ud = 0. Na tyristory VS1 je přivedeno celkové napětí dvou sekundárních vinutí transformátoru U2-2 + U1-2, VS2. Napětí na tyristoru VS1 je v propustném směru a na tyristoru VS2 ve zpětném směru.
Pokud jsou odpory nevodivých tyristorů při propustném a zpětném napětí uvažovány stejné, pak v intervalu 0 – v1 bude napětí na tyristorech (s přihlédnutím k odpovídající polaritě) určeno hodnotou (u2-1-u2 -2)/2 = u2.
V čase v1, určeném úhlem α, je z řídicího systému řídicího systému usměrňovače vyslán impuls do řídicí elektrody tyristoru VS1. V důsledku odblokování připojí tyristor VS1 zátěž rh k napětí U2-1 – t sekundárního vinutí transformátoru. Na zátěži vzniká napětí Ud v intervalu, který představuje úsek křivky napětí U2-1 = u2 Zátěží a tyristorem VS1 protéká proud.Při průchodu napájecího napětí nulou (/2-P), dojde k přechodu napájecího napětí přes nulu (/1-P). proud v tyristoru VSXNUMX se vynuluje a tyristor se uzavře.
V intervalu V2 – P se polarita napájecího napětí změní na opačnou. V tomto intervalu jsou oba tyristory usměrňovače uzavřeny. Na tyristor VS1 je přivedeno zpětné napětí a na tyristor VS2 propustné napětí rovné u2.
Na konci zadaného intervalu je do tyristoru VS2 vyslán odblokovací impuls. Odblokování tohoto tyristoru je způsobeno přivedením napětí ud=u2-2=u2 na zátěž stejného tvaru jako v intervalu vodivosti tyristoru VS1.
Zátěží a tyristorem protéká proud V intervalu 2P – V2 vodivosti tyristoru VS2 jsou napětí dvou sekundárních vinutí transformátoru připojena k tyristoru VS2, v důsledku čehož od okamžiku tyristor VS2 je odblokován, na tyristor VS1 působí zpětné napětí rovné 2u2.
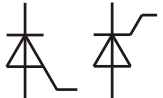
^ Obrázek 5. Časové diagramy usměrněného napětí
Regulační charakteristiky řízeného usměrňovače.
Maximální zpětné napětí odpovídá hodnotě, kde U2 je efektivní hodnota sekundárního napětí transformátorů.
Následně procesy v okruhu následují podobně jako ty, které byly diskutovány.
Jak bylo naznačeno, jednou z nejdůležitějších vlastností řízeného usměrňovače je jeho schopnost regulovat průměrnou hodnotu usměrněného napětí Ud při změně úhlu α. Při α = 0 odpovídá křivka výstupního napětí Ud případu neřízeného usměrňovače a napětí je maximální. Řídicí úhel α – P (180 el. stupňů) odpovídá Ud = 0 a Ud =0. Jinými slovy, řízený usměrňovač při změně úhlu α, od 0 do 180 el. kroupy reguluje napětí Ud v rozsahu od maximální hodnoty rovné 09 U2 do 0. Vzhled křivek Ud při různých hodnotách úhlu α je znázorněn na Obr. 5a – d.
Závislost napětí Ud na úhlu α se nazývá regulační charakteristika řízeného usměrňovače a je znázorněna na Obr. 6.
Jaký způsob ovládání tyristorů je nejúčinnější?
Jaké podmínky jsou nutné pro otevření tyristoru?
Za jakých podmínek se tyristor uzavírá?
Čím později se řídicí impuls objeví od začátku půlperiody, tím?
V jakém případě je provoz řídicího usměrňovače podobný provozu neřízeného usměrňovače?
Při jaké hodnotě regulačního úhlu je usměrněné napětí na výstupu řízeného usměrňovače minimální?
Tyristory jsou široce používány v polovodičových zařízeních a měničích. Na tyristorech byly stavěny různé zdroje, frekvenční měniče, regulátory, budiče pro synchronní motory a mnoho dalších zařízení, v poslední době je nahrazují tranzistorové měniče. Hlavním úkolem tyristoru je zapnout zátěž v okamžiku, kdy je přiveden řídicí signál. V tomto článku se podíváme na to, jak ovládat tyristory a triaky.
Obsah článku

Definice
Tyristor (tyristor) je polovodičový polořízený spínač. Polořízená znamená, že tyristor můžete pouze zapnout, vypne se pouze při přerušení proudu v obvodu nebo pokud je na něj přivedeno zpětné napětí.
Stejně jako dioda vede proud pouze jedním směrem. To znamená, že pro zapojení do obvodu střídavého proudu pro ovládání dvou půlvln potřebujete dva tyristory, jeden pro každý, i když ne vždy. Tyristor se skládá ze 4 polovodičových oblastí (pnpn).
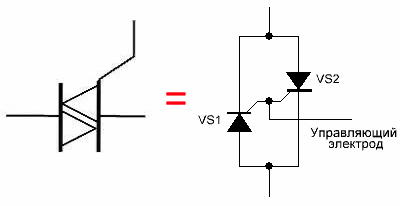
Další podobné zařízení se nazývá triak – obousměrný tyristor. Jeho hlavní rozdíl je v tom, že může vést proud v obou směrech. Ve skutečnosti se skládá ze dvou paralelně k sobě zapojených tyristorů.
Klíčové vlastnosti
Stejně jako všechny ostatní elektronické součástky mají tyristory řadu charakteristik:
Pokles napětí při maximálním anodovém proudu (VT nebo Uoc).
Stejnosměrné napětí v uzavřeném stavu (VD(RM) nebo Uзс).
Zpětné napětí (VR(PM) nebo Urev).
Stejnosměrný proud (IT nebo Ipr) je maximální proud v otevřeném stavu.
Maximální dopředná proudová kapacita (ITSM) je maximální špičkový proud v zapnutém stavu.
Zpětný proud (IR) je proud při určitém zpětném napětí.
Stejnosměrný proud v zavřeném stavu při určitém propustném napětí (ID nebo Isc).
Konstantní řídicí napětí odblokování (VGT nebo UУ).
Řídicí proud (IGT).
Maximální řídicí proud IGM elektrody.
Maximální přípustný ztrátový výkon na řídicí elektrodě (PG nebo PU)
Princip činnosti
Když je na tyristor přivedeno napětí, nevede proud. Existují dva způsoby, jak jej zapnout – přivést napětí mezi anodu a katodu dostatečné k otevření, pak se jeho činnost nebude lišit od dinistoru.
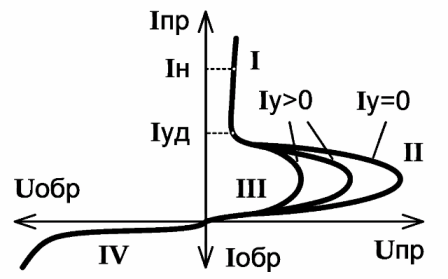
Dalším způsobem je přivedení krátkého impulsu na řídicí elektrodu. Vypínací proud tyristoru leží v rozmezí 70-160 mA, i když v praxi tato hodnota, stejně jako napětí, které je třeba na tyristor přivést, závisí na konkrétním modelu a instanci polovodičové součástky a dokonce i na podmínky, ve kterých pracuje, jako je okolní teplota prostředí.
Kromě řídicího proudu existuje takový parametr jako přídržný proud – to je minimální anodový proud pro udržení tyristoru v otevřeném stavu.
Po otevření tyristoru lze vypnout řídicí signál, tyristor bude otevřený, dokud jím protéká stejnosměrný proud a je přivedeno napětí. To znamená, že ve střídavém obvodu bude tyristor otevřen během této půlvlny, jejíž napětí předpíná tyristor v propustném směru. Když napětí klesne na nulu, sníží se i proud. Když proud v obvodu klesne pod přídržný proud tyristoru, sepne (vypne).
Polarita řídicího napětí musí odpovídat polaritě napětí mezi anodou a katodou, kterou pozorujete na výše uvedených oscilogramech.
Ovládání triaku je podobné, i když má některé funkce. K ovládání triaku v obvodu střídavého proudu jsou potřeba dva řídicí napěťové impulsy – pro každou půlvlnu sinusovky, resp.
Po přivedení řídicího impulsu v první půlvlně (podmíněně kladné) sinusového napětí poteče proud triakem až do začátku druhé půlvlny, po které se uzavře, jako běžný tyristor. Poté musíte použít další řídicí impuls, abyste otevřeli triak na záporné půlvlně. To je jasně znázorněno na následujících křivkách.
Polarita řídicího napětí musí odpovídat polaritě aplikovaného napětí mezi anodou a katodou. Z tohoto důvodu vznikají problémy při řízení triaků pomocí digitálních logických obvodů nebo z výstupů mikrokontroléru. To lze ale snadno vyřešit instalací triakového ovladače, o kterém si povíme později.
Běžné tyristorové nebo triakové řídicí obvody
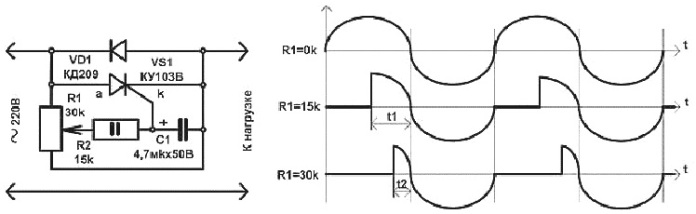
Nejběžnějším obvodem je triakový nebo tyristorový regulátor.
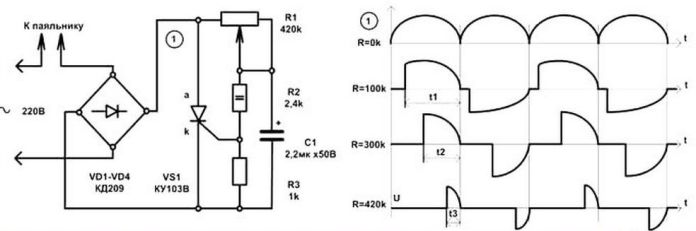
Zde se tyristor otevře poté, co je na kondenzátoru dostatečná hodnota k jeho otevření. Otevírací moment se nastavuje pomocí potenciometru nebo proměnného odporu. Čím větší je jeho odpor, tím pomaleji se kondenzátor nabíjí. Rezistor R2 omezuje proud řídící elektrodou.
Tento obvod reguluje oba poloviční cykly, což znamená, že získáte plnou kontrolu výkonu od téměř 0 % do téměř 100 %. Toho bylo dosaženo instalací regulátoru do diodového můstku, čímž byla regulována jedna z půlvln.
Níže je znázorněn zjednodušený obvod, zde je regulována pouze polovina periody, druhá půlvlna prochází beze změny diodou VD1. Princip fungování je podobný.
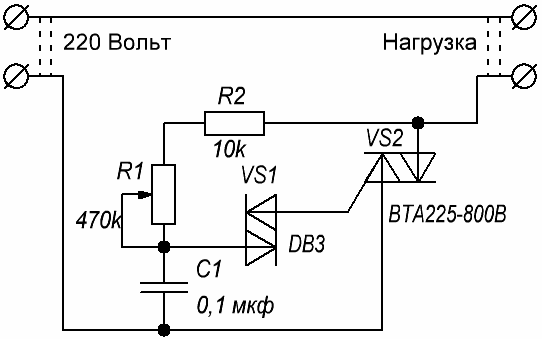
Triakový regulátor bez diodového můstku umožňuje ovládat dvě půlvlny.
Užitečná elektronika pro kutily, elektronické domácí výrobky na Telegramu: Praktická elektronika pro každý den
Principem fungování je téměř podobný předchozím, ale je s jeho pomocí postaven na triaku, obě půlvlny jsou regulovány. Rozdíly jsou v tom, že zde je řídicí impuls přiváděn pomocí obousměrného DB3 dinistoru po nabití kondenzátoru na požadované napětí, obvykle 28-36 Voltů. Rychlost nabíjení je také řízena proměnným odporem nebo potenciometrem. Toto schéma je implementováno ve většině domácích stmívačů.

Takové obvody regulace napětí se nazývají SIFU – pulzní fázový řídicí systém.
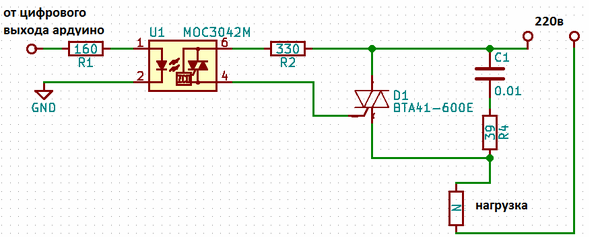
Obrázek výše ukazuje možnost ovládání triaku pomocí mikrokontroléru na příkladu populární platformy Arduino. Triakový ovladač se skládá z optosimistoru a LED. Protože je ve výstupním obvodu budiče instalován optosimistor, je do řídicí elektrody vždy přiváděno napětí požadované polarity, ale jsou zde určité nuance.
Faktem je, že pro regulaci napětí pomocí triaku nebo tyristoru musíte v určitém okamžiku použít řídicí signál, aby došlo k fázovému řezu na požadovanou hodnotu. Pokud budete střílet ovládací impulsy náhodně, obvod bude samozřejmě fungovat, ale nedojde k úpravám, takže je potřeba určit okamžik, kdy půlvlna projde nulou.
Protože na polaritě půlvlny v aktuálním časovém okamžiku pro nás nezáleží, stačí jednoduše sledovat okamžik přechodu nulou. Takový uzel v obvodu se nazývá nulový detektor nebo nulový detektor a v anglických zdrojích „zero crossing detector circuit“ nebo ZCD. Verze takového obvodu s detektorem průchodu nulou pomocí tranzistorového optočlenu vypadá takto:
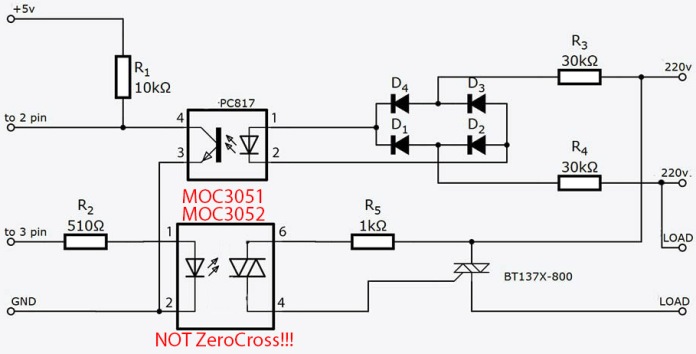
Optodriverů pro ovládání triaků je mnoho, typickými jsou řada MOC304x, MOC305x, MOC306X z produkce Motoroly a dalších. Tyto ovladače navíc poskytují galvanické oddělení, které ochrání váš mikrokontrolér v případě poruchy polovodičového spínače, což je docela možné a pravděpodobné. Tím se také zvýší bezpečnost práce s řídicími obvody úplným rozdělením obvodu na „silový“ a „provozní“.
Závěr
Povídali jsme si o základních informacích o tyristorech a triacích a také o jejich ovládání v obvodech se „změnami“. Stojí za zmínku, že jsme se nedotkli tématu vypínacích tyristorů, pokud vás tato problematika zajímá, napište komentáře a my je podrobněji zvážíme. Rovněž nebyly brány v úvahu nuance použití a ovládání tyristorů ve výkonových indukčních obvodech. Pro ovládání „konstanty“ je lepší použít tranzistory, protože v tomto případě se rozhodujete, kdy se klíč otevře a kdy se zavře, podle řídicího signálu.
Doufám, že vám tento článek pomohl. Podívejte se také na další články z kategorie Elektrická energie v každodenním životě i v práci » Praktická elektronika
Přihlaste se k odběru kanálu Telegram o elektronice pro profesionály i amatéry: Praktická elektronika pro každý den















