Dobré odpoledne všichni. Dnes jsem narazil na pro mě neznámý systém: ultrazvukový sonar na Lexus RX350 z roku 2013. Vůz byl zasažen do obličeje (hák vpravo), následkem čehož došlo k nenávratnému poškození 2 pravých parkovacích senzorů. Lakýrníci opravili karoserii a vyměnili senzory za NOVÉ se stejnými čísly, ale systém je odmítl přijmout, protože nemám dealerský skener, zkontroloval jsem to u Launch. Z nějakého důvodu systém píše: levá není definována, zbytek je rozbitý, zkusil jsem změnit místo – někdy je všechno rozbité, nebo stejné. Nezasáhlo to správné senzory, ale také nefungují a vzadu je vše v pořádku.
Kabeláž jsem několikrát kontroloval i po sundání z nárazníku. Vysvětlete, ví někdo, jak tento systém určuje, kde se který senzor nachází, a jak tento problém vyřešit?
VIN: JTJBK11A102459443
Možná téma pro sekci o diagnostice zahraničních aut?
Obsah
- sergun
- 41. kraj
- sergun
- 41. kraj
- sergun
- sergun
- Polikarpov
- sergun
- Polikarpov
- sergun
- Polikarpov
- sergun
- Polikarpov
- sergun
- Polikarpov
- Funkční schéma parkovacích senzorů
- Schematické schéma parkovacích senzorů na elektroměru
- Schéma zapojení na mikrokontroléru
- Princip
- Obvod infračerveného parkovacího senzoru
sergun
41. kraj
Četl jsem to při spuštění, takže číslo chyby je neohrabané – sada znaků, ale dekódování je v ruštině: (porucha předního snímače) a nic víc.
Zkusím nainstalovat Toyota tech stream, ale nejsem si jistý, že ten bezplatný program toto auto přečte?
sergun
Nainstalujte verze 9-10. Musím pracovat. Doporučuji osobně zkontrolovat shodu nainstalovaných snímačů.
41. kraj
Vypadá to, že problém je v senzorech, jak mi řekli lakýrníci – byly zakoupeny neoriginální senzory (2x levněji), aby se ušetřilo.
Otázka: je možné bezbolestně zkontrolovat čidla na zadním parkovacím radaru?
sergun
Vypadá to, že problém je v senzorech, jak mi řekli lakýrníci – byly zakoupeny neoriginální senzory (2x levněji), aby se ušetřilo.
Zkontroloval jsem všechny přední senzory na zadním nárazníku a byly v pořádku.
Zkontroloval jsem průchodnost kabelu multimetrem.Mohlo by dojít k poškození pouze předních parkovacích senzorů následkem nehody?
sergun
Polikarpov
Jak jinak můžete být pozornější? V prvním příspěvku jsem psal, že jsem s tím začal.
Zajímá mě kompetentní názor odborníka: možná v důsledku zkratu nebo podobně. Poškozená je pouze jedna strana, tzn. vpředu v ECU sonaru?!
sergun
Vnitřní poškození ECU je možné pouze v případě, že je kabeláž snímače připojena k nějakému druhu napájení. Teoreticky. Ve skutečnosti je Toyota moje oblíbená značka a nikdy jsem neodsuzoval jedinou ECU. To jsem já v otázce spolehlivosti.
Pokud jste si 100% jisti integritou obvodů, vadnou ECU, nejsou žádné jiné možnosti. Pro naprostý klid bych zkusil senzor „zasadit“ přímo do konektoru ECU parkovacího senzoru.
Polikarpov
sergun
Musíme se podívat na diagram. Předpokládám, že každý senzor má svůj vlastní kanál. Pokud senzor vidí „zamítnutý“ kanál, je kabeláž vadná. Pokud to nevidí, problém je v ECU. Logický?
Polikarpov
Obvod je třívodičový, snímače jsou samourčující, lze je zaměnit, informace na jednom vodiči prochází od prvního k poslednímu.
sergun
Pak by byl každý v „nedefinovaném“ stavu, nebo by byl každý „v útesu“. Zkuste „umístit“ senzor na informační kanál podle schématu.
Polikarpov
Problém je zřejmě v elektroinstalaci, ale jak jinak to mohu zkontrolovat? Zbývají jen konektory, které je potřeba dodatečně zalisovat.
sergun
Polikarpov
Problém je zřejmě v elektroinstalaci, ale jak jinak to mohu zkontrolovat? Zbývají jen konektory, které je potřeba dodatečně zalisovat.
Potřeboval bych dealerský skener.
ale můžeš to zkusit ručně. Jak jsi zkontroloval elektroinstalaci?
Obecně by se mělo napájení zkontrolovat pomocí testeru. pro napájení každého senzoru by mělo být 30-40 voltů (vysoká frekvence, ale tester stále něco ukazuje)
třetí vodič je pravděpodobně signální vodič, zavolejte jej do ECU
– hledejte alespoň schéma
bez skeneru a bez obvodu se není čeho chytit
Přidáno po 4 minutách
“” “Některý senzor s největší pravděpodobností spotřebovává energii, a proto všechny senzory „trpí“ a napájení těchto senzorů je asi 30 voltů. Dovolte mi vysvětlit, jak se liší standardní senzory (systémy parkovacích senzorů) od nestandardních (zhruba řečeno čínských). U „čínských“ parkovacích senzorů se od řídicí jednotky ke každému senzoru (podmíněně sekvenčně *) jednoduše přivádí do piezoelektrického prvku balíček impulzů o frekvenci asi 30 – 40 kHz a amplitudě asi 30 voltů. A na standardním třívodičovém systému (od výrobce) jsou všechny senzory (s vestavěným mikroobvodem) napájeny konstantním napětím asi 30 voltů (dva vodiče – napájení a pouzdro, společné pro všechny senzory). Třetím vodičem je řídicí vodič (každý senzor má svůj), přes který je signál buď přiváděn do senzoru, nebo je přijímán odražený (stejně jako v čínštině),
(podmíněně sekvenční *) – ne všechny senzory vysílají impulsy stejně často, u centrálních a bočních senzorů je frekvence odlišná, zřejmě je to způsobeno diagramem citlivosti na detekovanou vzdálenost.““
Přečtěte si to. -Tyto informace o senzorech jsem někde zkopíroval, pravděpodobně jsou to podivné s vnitřním mikroobvodem
Princip činnosti parkovacích systémů je založen na vyzařování signálů, které jsou přijímány po odrazu od překážky a zpracovávány řídicím zařízením (například mikrokontrolérem). Na základě parametrů přijímaného signálu je vypočítána vzdálenost k překážce, po jejímž uplynutí se na zobrazovací jednotce zobrazí odpovídající informace. Vlastnosti konkrétního schématu elektrického zapojení parkovacího senzoru se mohou lišit v závislosti na typu použitých senzorů, počtu doplňkových funkcí, ceně parkovacího systému atd. Základní princip fungování zůstává nezměněn.
Jako vysílače a přijímače se obvykle používají stejné senzory. Nejběžnější možností jsou ultrazvukové sonary, ale používají se i infračervené a elektromagnetické senzory.
Funkční schéma parkovacích senzorů
Zvažme princip fungování parkovacího asistenta na příkladu jedné z variant funkčního schématu zařízení.
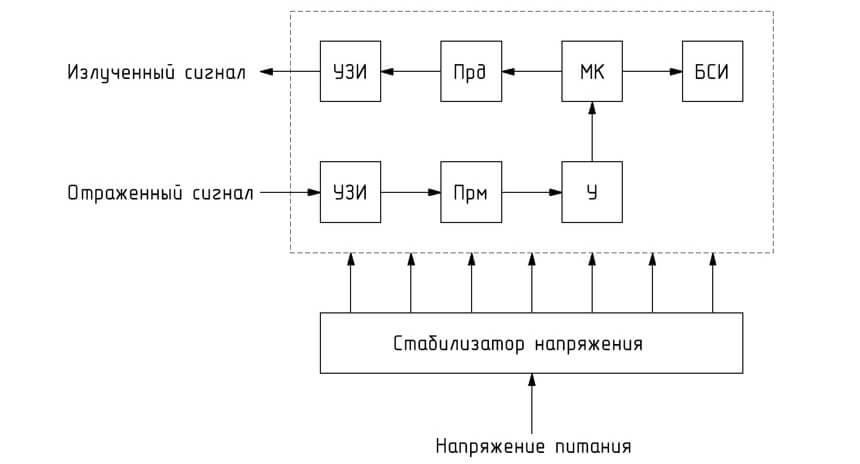
Činnost tohoto obvodu je řízena mikrokontrolérem (MK na obr. 1). V určených časech mikrokontrolér dodává řídicí signály do vysílače (Transmitter), který zapíná senzory (ultrazvuk) pro přenos. Při přiblížení k překážce jsou signály od ní odražené odeslány do obvodu přijímače (Rm), poté zesíleny zesilovačem (U) a odeslány do mikrokontroléru.
Mikroobvod MK analyzuje parametry přijímaných signálů (u ultrazvukových snímačů hodnotu časového zpoždění), načež řídí další činnost vysílače a signalizační jednotky (BSI).
Funkční schémata různých parkovacích senzorů mají určité rozdíly. Jednodušší se například obejdou úplně bez mikrokontrolérů. V tomto případě se řízení provádí prostřednictvím jiných elektronických mikroobvodů.
Schematické schéma parkovacích senzorů na elektroměru
Podívejme se na příklad schématu zapojení parkovacího senzoru sestaveného na desítkovém děliči. V našem případě se jedná o MS K561IE8.
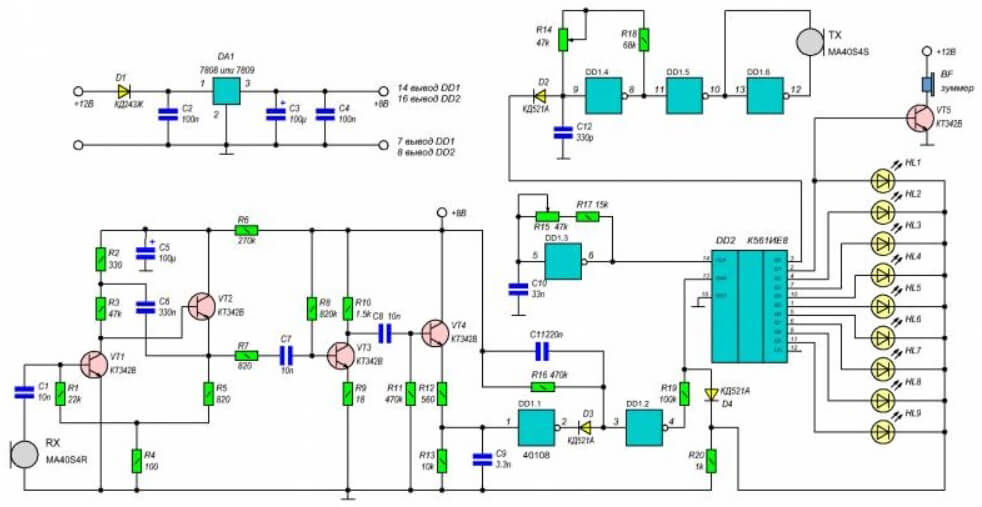
Jako senzory se používají dvě různá zařízení – ultrazvukový vysílač (TX, MA40S4S) a přijímač (RX, MA40S4R). Ultrazvukový pulzní generátor je namontován na K561TL MS. Zde DD1.5 hraje roli výstupní vyrovnávací paměti, DD1.6 je zesilovač výstupního signálu a DD1.4 je samotný generátor. Generovaná frekvence je přibližně 40 kHz a tento indikátor lze upravit pomocí rezistoru R14.
Parkovací senzory jsou napájeny ze sítě 12 V (je vhodné odebírat napájení z couvacího světla nebo využít alternativní možnosti při připojení předních senzorů). Stabilizátor vstupního napětí je proveden na prvku DA1.
V okamžiku vynulování desetinného čítače je na výstupu Q0 generován řídicí elektrický impuls, který spustí vysílání vysílače TX. Zbývající výstupy K561IE8 slouží k indikaci vzdálenosti od překážky.
Odražený signál je po detekci na RX zesílen kaskádou VT1–VT4 a spíná spouštěč (DD1.1 a DD1.2). Tím je provoz počítadla dočasně zastaven. Jedna z LED se rozsvítí a indikuje vzdálenost k překážce. Zařazení diody HL9 indikuje maximální vzdálenost od překážky a HL1 označuje minimální. Současně s diodou HL1 se zapne zvukový alarm na bzučáku BF.
Popsané schéma zapojení poskytuje možnost ručního nastavení řady parametrů. Potenciometr R14 nastavuje citlivost zařízení. Pomocí R15 se nastavuje rozsah odezvy mezi LED. Můžete například nastavit mezeru 10 cm pro každou z diod, poté budou parkovací senzory fungovat ve vzdálenosti 90 cm od překážky.
Všimněte si, že daný elektrický obvod parkovacích senzorů umožňuje jeho propojení pouze s jedním párem senzorů. Jedná se o velmi jednoduchou a levnou možnost organizace parkovacího systému.
Schéma zapojení na mikrokontroléru
Toto schéma zapojení parkovacích senzorů odpovídá schématu znázorněnému na obr. 1 funkční.
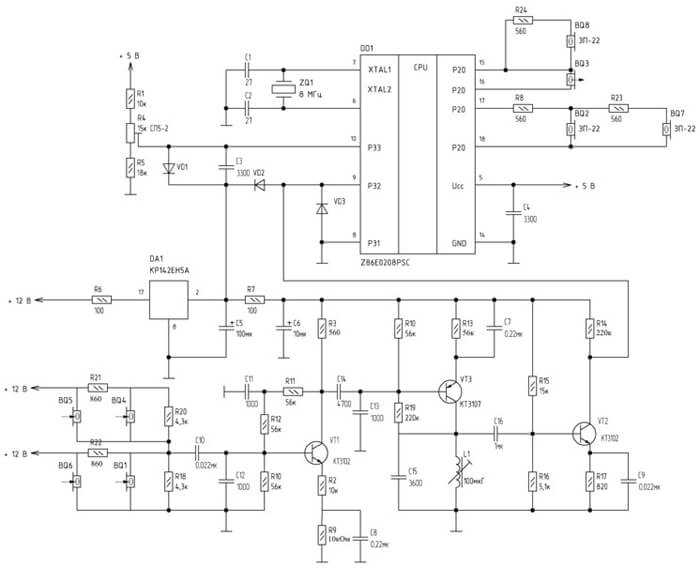
Schéma zapojení je sestaveno na 8bitovém mikrokontroléru Z86E0208PSC značky ZiLOG (DD1). DA1 je stabilizátor napětí 7805, který poskytuje napájení +5 V. Rezonanční zesilovač je sestaven pomocí tranzistorů VT1–VT3. Jsou použity čtyři ultrazvukové vysílače a přijímače (BQ).
Jako časovací obvod je použit obvod na bázi křemenného oscilátoru ZQ (8 MHz) a kondenzátorů C3, C4. Ultrazvukové emitory jsou připojeny ke kolíkům 15-18 portu 2 ovladače. Na vstupy emitorů jsou přiváděny pulsní pakety s délkou trvání 1 ms a budicím kolísáním napětí 10 V.
Odražené ultrazvukové vlny jsou přijímány přijímači BQ1, BQ5-7, připojenými ke vstupnímu obvodu třístupňového zesilovače pomocí tranzistorů KT3102. Z výstupu zesilovače je signál přiveden na vstup P32 regulátoru – neinvertující vstup komparátoru. Z děliče R1–R3 je na invertující vstup P33 přivedeno referenční napětí +2,7 V. Dodatečnou ochranu proti rušení zajišťuje omezovací dioda VD1 s kondenzátorem C1. Pro omezení okamžitých hodnot přijímaného impulsu na úrovně 0 a 5 V se používají diody VD2 a VD3.
Schéma elektrického obvodu tohoto parkovacího radaru zahrnuje připojení napájení ke zpětnému světlometu vozidla, levému a pravému blinkru. Tím je zajištěno, že se systém spustí při zařazení zpátečky nebo při změně jízdního pruhu/odbočení.
Čip DA1 převádí 12 V na napájecí napětí Z86E02 MS + 5 V a stabilizuje ho. Na rezistoru R6 a kondenzátorech C2, C8 a C13 je namontován filtr pro potlačení rušení. Na rezistorech R1 a R5 je implementován dělič napětí 2,7 V.
Princip
Po zapnutí parkovacího radaru zahájí řídicí čip činnost zářičů. Když se v oblasti pokrytí systému objeví překážka, ultrazvuk se odráží a vrací se do přijímače. Na základě doby zpoždění vypočítá mikrokontrolér vzdálenost k překážce a generuje příslušné varovné signály: časté ve vzdálenosti menší než 1 metr od překážky a vzácné ve vzdálenostech 1-2 metry.
Po vyslání paketu v délce 1 ms regulátor přepne obvod do pohotovostního režimu a činnost vysílačů je potlačena. Pokud po 60 ms odražená vlna nebyla přijata přijímači, začne radar znovu vysílat.
Obvod infračerveného parkovacího senzoru
Na závěr uvádíme nejjednodušší schéma elektrického obvodu parkovacího senzoru, sestaveného pomocí infračervených zářičů.
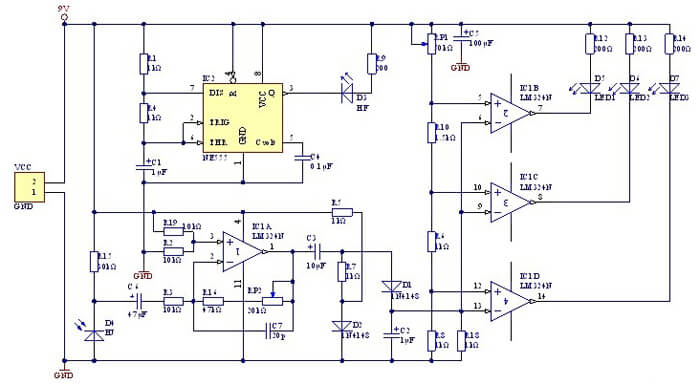
Činnost tohoto elektrického obvodu parkovacího senzoru je založena na interakci operačního zesilovače LM324 a časovače NE555. Používají se dvě IR diody – vysílač a přijímač. Jako indikátory se používají tři LED – červená, zelená, žlutá.
Schéma zapojení parkovacího senzoru je nakonfigurováno tak, že poskytuje třístupňový alarm o přibližujícím se objektu. Ve vzdálenosti 30 cm se rozsvítí žlutá LED, ve 20 cm žlutá a zelená, ve vzdálenosti 10 cm svítí všechny tři indikátory.
Navzdory své jednoduchosti je tento obvod zajímavý, protože desku plošných spojů se všemi potřebnými díly lze zakoupit v každém obchodě s rádiovými díly.
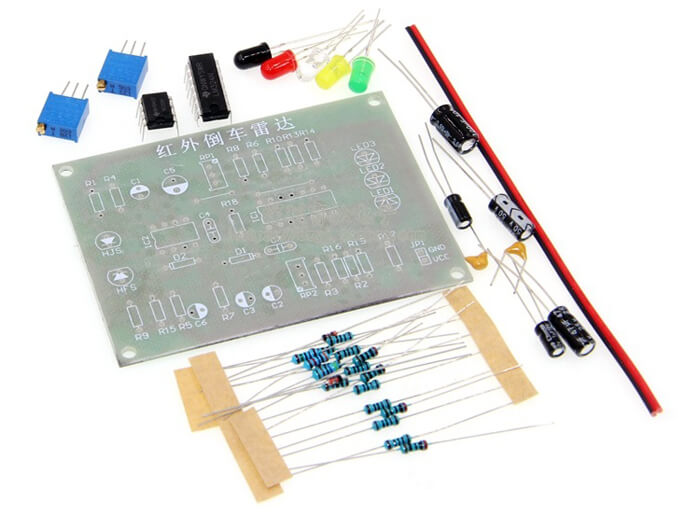
Pokud si přejete, můžete si parkovací senzory sestavit sami pomocí tohoto elektrického obvodu. Je pravda, že budete muset přesunout indikátory za obvodovou desku senzoru a umístit je někam do oblasti palubní desky.















