
Vlastnosti stejnosměrných elektromotorů jsou dány především způsobem zapínání budícího vinutí. V závislosti na tom se rozlišují elektromotory:
1. s nezávislým buzením: budicí vinutí je napájeno externím stejnosměrným zdrojem (budič nebo usměrňovač),
2. s paralelním buzením: budicí vinutí je připojeno paralelně k vinutí kotvy,
3. se sériovým buzením: budicí vinutí je zapojeno do série s vinutím kotvy,
4. se smíšeným buzením: má dvě budicí vinutí, jedno zapojeno paralelně s vinutím kotvy a druhé s ním sériově.
Všechny tyto elektromotory mají stejnou konstrukci a liší se pouze konstrukcí budícího vinutí. Budicí vinutí těchto elektromotorů jsou vyrobena stejným způsobem jako u příslušných generátorů.
Nezávisle buzený stejnosměrný motor
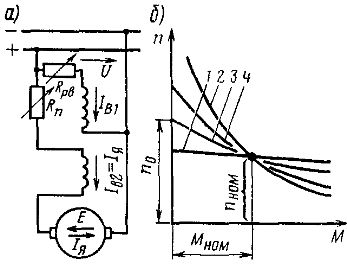
U tohoto elektromotoru (obr. 1, a) je vinutí kotvy připojeno k hlavnímu zdroji stejnosměrného proudu (stejnosměrná síť, generátor nebo usměrňovač) s napětím U a budicí vinutí je připojeno k pomocnému zdroji s napětím UB. Řídicí reostat Rрв je součástí obvodu budícího vinutí a spouštěcí reostat Rn je součástí obvodu vinutí kotvy.
Řídicí reostat slouží k regulaci rychlosti otáčení kotvy motoru a spouštěcí reostat slouží k omezení proudu ve vinutí kotvy při spouštění. Charakteristickým rysem elektromotoru je, že jeho budicí proud Iв nezávisí na proudu Iа ve vinutí kotvy (zatěžovací proud). Pokud tedy zanedbáme demagnetizační účinek reakce kotvy, můžeme přibližně předpokládat, že tok motoru F nezávisí na zatížení. Závislosti elektromagnetického momentu M a rychlosti otáčení n na proudu Iа budou lineární (obr. 2, a). V důsledku toho bude i mechanická charakteristika motoru lineární – závislost n (M) (obr. 2, b).
Při absenci reostatu s odporem Rn v obvodu kotvy budou rychlostní a mechanické charakteristiky tuhé, tj. s malým úhlem sklonu k horizontální ose, protože pokles napětí IаΣRя ve vinutí stroje zahrnutých v obvodu kotvy při jmenovitém zatížení je pouze 3–5 % Unom. Tyto charakteristiky (přímky 1 na obr. 2, a a b) se nazývají přirozené. Když je v obvodu kotvy zahrnut reostat s odporem Rn, úhel sklonu těchto charakteristik se zvyšuje, v důsledku čehož je možné získat rodinu reostatických charakteristik 2, 3 a 4, odpovídající různým hodnotám Rn1 Rn2 a Rn3.
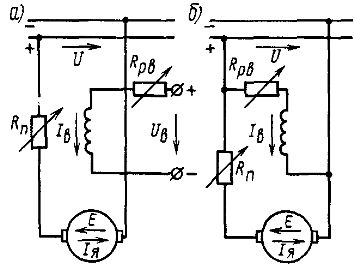
Rýže. 1. Schémata stejnosměrných elektromotorů s nezávislým (a) a paralelním (b) buzením
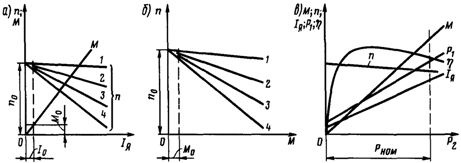
Rýže. 2. Charakteristika stejnosměrných elektromotorů s nezávislým a paralelním buzením: a – otáčkové a kroutící, b – mechanické, c – provozní Čím větší je odpor Rn, tím větší je úhel sklonu reostatické charakteristiky, t.j. tím je měkčí. .
Nastavovací reostat Rpv umožňuje měnit budicí proud motoru Iv a jeho magnetický tok F. V tomto případě se změní i rychlost otáčení n.
V obvodu budicího vinutí nejsou instalovány žádné spínače ani pojistky, protože při přerušení tohoto obvodu se magnetický tok elektromotoru prudce sníží (v něm zůstává pouze tok zbytkového magnetismu) a dojde k nouzovému režimu. Pokud elektromotor běží na volnoběh nebo s malým zatížením hřídele, rychlost otáčení se prudce zvýší (motor se začne točit). V tomto případě se proud ve vinutí kotvy Iа značně zvýší a může dojít ke kruhovému požáru. Aby se tomu zabránilo, musí ochrana odpojit motor od zdroje napájení.
Prudký nárůst rychlosti otáčení při přerušení obvodu budícího vinutí se vysvětluje tím, že v tomto případě magnetický tok F (na hodnotu toku Fost ze zbytkového magnetismu) a e prudce klesá. d.s. E a proud Iа se zvyšuje. A protože přiložené napětí U zůstává nezměněno, rychlost otáčení n se bude zvyšovat až do e. d.s. E nedosáhne hodnoty přibližně rovné U (což je nutné pro rovnovážný stav elektrického obvodu kotvy, při kterém E = U – IаΣRя.
Když se zatížení hřídele blíží jmenovitému, elektromotor se zastaví, pokud se přeruší budicí obvod, protože elektromagnetický moment, který může motor vyvinout při výrazném snížení magnetického toku, klesá a je menší než zatěžovací moment na hřídel. V tomto případě se prudce zvýší i proud Iа a stroj musí být odpojen od zdroje energie.
Je třeba poznamenat, že otáčky n0 odpovídají ideálním volnoběžným otáčkám, kdy motor nespotřebovává elektrickou energii ze sítě a jeho elektromagnetický moment je nulový. V reálných podmínkách v režimu volnoběhu motor spotřebovává ze sítě volnoběhový proud I0 nezbytný pro kompenzaci vnitřních ztrát výkonu a vyvíjí určitý krouticí moment M0 potřebný k překonání třecích sil ve stroji. Proto jsou ve skutečnosti otáčky naprázdno menší než n0.
Závislost rychlosti otáčení n a elektromagnetického momentu M na výkonu P2 (obr. 2, c) na hřídeli motoru, jak vyplývá z uvažovaných vztahů, je lineární. Téměř lineární jsou také závislosti proudu Iya vinutím kotvy a výkonu P1 na P2. Proud Iya a výkon P1 při P2 = 0 představují proud naprázdno I0 a výkon P0 spotřebovaný během chodu naprázdno. Křivka účinnosti má charakter společný pro všechny elektrické stroje.
DC bočníkový motor
U tohoto elektromotoru (viz obr. 1, b) je buzení a vinutí kotvy napájeno stejným zdrojem elektrické energie s napětím U. V obvodu budícího vinutí je zařazen seřizovací reostat Rpv a součástí je spouštěcí reostat Rp v obvodu vinutí kotvy.
U uvažovaného elektromotoru je v podstatě oddělené napájení obvodů kotvy a budicího vinutí, v důsledku čehož budicí proud Iв nezávisí na proudu vinutí kotvy Iв. Proto bude mít bočníkem buzený elektromotor stejné charakteristiky jako samostatně buzený motor. Boční motor však normálně funguje pouze při napájení ze zdroje stejnosměrného proudu s konstantním napětím.
Při napájení elektromotoru ze zdroje s proměnným napětím (generátor nebo řízený usměrňovač) pokles napájecího napětí U způsobí odpovídající pokles budícího proudu Iв a magnetického toku Ф, což vede ke zvýšení vinutí kotvy. aktuální Iа. To omezuje možnost regulace rychlosti otáčení kotvy změnou napájecího napětí U. Elektromotory určené k napájení generátorem nebo řízeným usměrňovačem proto musí mít nezávislé buzení.
Sériově vinutý stejnosměrný motor
Pro omezení proudu při rozběhu je k obvodu vinutí kotvy připojen spouštěcí reostat Rп (obr. 3, a) a pro regulaci rychlosti otáčení lze paralelně k budícímu vinutí připojit nastavovací reostat Rрв.
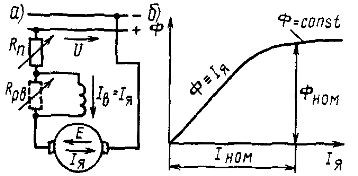
Rýže. 3. Schéma stejnosměrného elektromotoru se sekvenčním buzením (a) a závislost jeho magnetického toku Ф na proudu Iа ve vinutí kotvy (b) Obr.
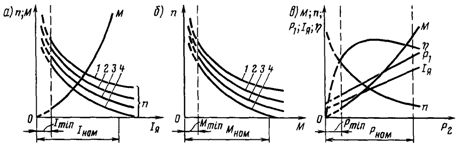
Rýže. 4. Charakteristika stejnosměrného elektromotoru se sekvenčním buzením: a – otáčkový a kroutící moment, b – mechanický, c – provozní.
Charakteristickým rysem tohoto elektromotoru je, že jeho budicí proud Iв je roven nebo úměrný (při zapnutém reostatu Rpв) proudu vinutí kotvy Iа, proto magnetický tok Ф závisí na zatížení motoru (obr. 3, b ).
Když je proud vinutím kotvy Iya menší (0,8-0,9) než jmenovitý proud Inom, magnetický systém stroje není nasycen a můžeme předpokládat, že magnetický tok Ф se mění přímo úměrně proudu Iа. Proto bude rychlostní charakteristika elektromotoru měkká – se zvýšením proudu I se rychlost otáčení n prudce sníží (obr. 4, a). Ke snížení rychlosti otáčení n dochází v důsledku zvýšení úbytku napětí IаΣRа. ve vnitřním odporu Rya. obvod vinutí kotvy, stejně jako v důsledku zvýšení magnetického toku F.
Elektromagnetický moment M bude prudce narůstat s rostoucím proudem Iа, protože v tomto případě roste i magnetický tok Ф, tj. moment M bude úměrný proudu Iа. Proto při proudu Iya menším než (0,8 N – 0,9) Inom má rychlostní charakteristika tvar hyperboly a momentová charakteristika tvar paraboly.
Při proudech Iа > Inom jsou závislosti M a n na Iа lineární, protože v tomto režimu bude magnetický obvod nasycen a magnetický tok Ф se při změně proudu Iа nezmění.
Mechanickou charakteristiku, tj. závislost n na M (obr. 4, b), lze sestrojit na základě závislostí n a M na Iа. Kromě přirozené charakteristiky 1 je možné zařazením reostatu s odporem Rp do obvodu vinutí kotvy získat rodinu reostatických charakteristik 2, 3 a 4. Tyto charakteristiky odpovídají různým hodnotám Rn1, Rn2 a Rn3, a čím větší Rn, tím nižší je charakteristika umístěna.
Mechanické vlastnosti dotyčného motoru jsou měkké a hyperbolické povahy. Při nízkém zatížení magnetický tok Ф velmi klesá, rychlost otáčení n prudce stoupá a může překročit maximální přípustnou hodnotu (motor se začne točit). Proto nelze takové motory použít pro pohon mechanismů pracujících v klidovém režimu a při nízké zátěži (různé stroje, dopravníky apod.).
Obvykle je minimální přípustné zatížení pro motory s vysokým a středním výkonem (0,2 . 0,25) Inom. Aby motor nemohl pracovat bez zatížení, je s pohonem spojen napevno (převodovým převodem nebo slepou spojkou), použití řemenového pohonu nebo třecí spojky je nepřípustné.
Navzdory této nevýhodě se široce používají motory se sekvenčním excitací, zejména tam, kde dochází ke změnám v točivém momentu v zatížení v širokém rozsahu a obtížné počáteční podmínky: ve všech trakčních jednotek (elektrické lokomotivy, dieselové lokomotivy, elektrické vlaky, elektrické vozy, elektrické vysokozdvižné vozíky, atd.), jakož i v pohonech zdvihacích mechanismů (jeřáby, výtahy atd.).
To se vysvětluje tím, že při měkké charakteristice vede zvýšení zatěžovacího momentu k menšímu nárůstu proudu a spotřeby energie než u motorů s nezávislým a paralelním buzením, proto motory se sériovým buzením lépe odolávají přetížení. Kromě toho mají tyto motory vyšší rozběhový moment než motory s paralelním a nezávislým buzením, protože při zvýšení proudu vinutím kotvy při rozběhu se odpovídajícím způsobem zvýší magnetický tok.
Připustíme-li např., že krátkodobý rozběhový proud může být 2násobek jmenovitého pracovního proudu stroje a zanedbáme vliv saturace, reakce kotvy a úbytku napětí v obvodu jeho vinutí, pak v u motoru se sériovým buzením bude rozběhový moment 4krát vyšší než jmenovitý (u Jak proud, tak magnetický tok se zvýší 2krát) au motorů s nezávislým a paralelním buzením – pouze 2krát více.
Ve skutečnosti se v důsledku nasycení magnetického obvodu magnetický tok nezvyšuje úměrně k proudu, ale přesto bude startovací moment motoru se sériovým buzením, pokud jsou ostatní věci stejné, podstatně větší než startovací moment. stejného motoru s nezávislým nebo paralelním buzením.
Závislosti n a M na výkonu P2 na hřídeli elektromotoru (obr. 4, c), jak vyplývá z ustanovení probraných výše, jsou nelineární, závislosti P1, Iа a η na P2 mají stejný tvar jako u motory s paralelním buzením.
Stejnosměrný motor se smíšeným buzením
V tomto elektromotoru (obr. 5, a) vzniká magnetický tok Ф jako výsledek kombinovaného působení dvou budicích vinutí – paralelního (nebo nezávislého) a sériového, kterými procházejí budicí proudy Iв1 a Iв2 = Iя

kde Fposl je magnetický tok sériového vinutí v závislosti na proudu Iya, Fpar je magnetický tok paralelního vinutí, který není závislý na zátěži (určuje se budicím proudem Ib1).
Mechanické charakteristiky elektromotoru se smíšeným buzením (obr. 5, b) se nacházejí mezi charakteristikami motorů s paralelním (přímka 1) a sériovým (křivka 2) buzením. V závislosti na poměru magnetomotorických sil paralelního a sériového vinutí ve jmenovitém režimu je možné charakteristiku motoru se smíšeným buzením přiblížit k charakteristice 1 (křivka 3 při nízkých ppm sériového vinutí) nebo k charakteristice 2 (křivka 4 při nízkých ppm).paralelní vinutí).
Rýže. 5. Schéma elektrického motoru se smíšeným buzením (a) a jeho mechanické charakteristiky (b)
Výhodou stejnosměrného motoru se smíšeným buzením je, že má měkkou mechanickou charakteristiku a může pracovat při volnoběhu, když Fseq = 0. V tomto režimu je frekvence otáčení její kotvy určena magnetickým tokem Fpar a má omezenou hodnotu (motor se neroztáčí).
Telegramový kanál pro ty, kteří se chtějí každý den učit nové a zajímavé věci: Škola pro elektrikáře
Pokud se vám tento článek líbil, sdílejte odkaz na něj na sociálních sítích. Velmi to pomůže rozvoji našeho webu!
















