Prokluz je jednou z hlavních charakteristik elektromotoru. Liší se v závislosti na provozním režimu, zatížení hřídele a napájecím napětí. Podívejme se blíže na to, co je skluz elektromotoru, na čem závisí a jak se určuje.
Obsah
- Co je to
- Velikost skluzu v různých provozních režimech
- Metody měření
- Prokluz indukčního motoru
Co je to
Princip činnosti třífázového asynchronního motoru je poměrně jednoduchý. Do vinutí statoru je přivedeno napájecí napětí, které vytváří magnetický tok, v každé fázi bude posunut o 120 stupňů. V tomto případě bude součtový magnetický tok rotující.
Vinutí rotoru je uzavřený obvod, indukuje se v něm EMF a výsledný magnetický tok uděluje rotaci rotoru ve směru pohybu magnetického toku statoru. Elektromagnetický moment se snaží vyrovnat rychlost otáčení magnetických polí statoru a rotoru.
Hodnota, která určuje rozdíl rychlostí otáčení magnetických polí rotoru a statoru, se nazývá skluz. Protože rotor asynchronního motoru se vždy otáčí pomaleji než pole statoru, je obvykle menší než jedna. Lze měřit v relativních jednotkách nebo procentech.
Vypočítá se pomocí vzorce:
kde n1je frekvence rotace magnetického pole, n2 – frekvence otáčení magnetického pole rotoru.
Skluz je důležitou charakteristikou charakterizující normální provoz asynchronního elektromotoru.
Velikost skluzu v různých provozních režimech
V klidovém režimu se skluz blíží nule a činí 2-3%, protože n1 téměř rovné n2. Nemůže se rovnat nule, protože pole statoru v tomto případě neprotíná pole rotoru, zjednodušeně řečeno se motor netočí a není k němu přiváděno napájecí napětí.
Ani při dokonalém volnoběhu nebude skluz vyjádřený v procentech nulový. S může také nabývat záporných hodnot, když elektromotor pracuje v režimu generátoru.
V režimu generátoru (rotace rotoru je proti směru pole statoru) bude EM skluz v hodnotách -∞
Nechybí ani režim elektromagnetického brzdění (záběr protirotoru), v tomto režimu nabývá skluz hodnoty větší než jedna, se znaménkem plus.
Frekvence proudu ve vinutí rotoru se rovná frekvenci síťového proudu pouze v okamžiku rozběhu. Při jmenovité zátěži bude aktuální frekvence určena vzorcem:
kde f1 je frekvence proudu dodávaného do vinutí statoru a S je skluz.
Frekvence rotorového proudu je přímo úměrná jeho indukční reaktanci. Objevuje se tedy závislost proudu v rotoru na klouzání IM. Točivý moment elektromotoru závisí na hodnotě S, protože je určen hodnotami magnetického toku, proudu a úhlu posunu mezi emf a proudem rotoru.
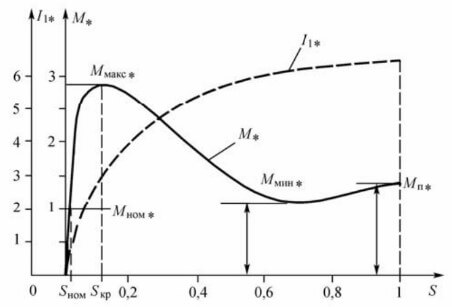
Proto je pro podrobné studium charakteristik krevního tlaku stanoven vztah znázorněný na obrázku výše. Změnu točivého momentu (při různých hodnotách skluzu) u IM s vinutým rotorem lze tedy regulovat zavedením odporu do obvodu vinutí rotoru. U elektromotorů s rotorem nakrátko je točivý moment regulován buď pomocí frekvenčních měničů, nebo pomocí motorů s proměnnou charakteristikou.
Při jmenovitém zatížení motoru bude hodnota skluzu v rozmezí 8%-2% (pro motory malého a středního výkonu), jmenovitý skluz.
S narůstajícím zatížením hřídele (točivý moment na hřídeli) bude narůstat skluz, zjednodušeně řečeno, magnetické pole rotoru se bude stále více zpožďovat (zpomalovat) za magnetickým polem statoru. Zvýšení skluzu (S) povede k proporcionálnímu zvýšení proudu rotoru, proto se úměrně zvýší točivý moment. Ale zároveň se zvyšují aktivní ztráty v rotoru (zvyšuje se odpor), které snižují nárůst proudové síly, takže točivý moment roste pomaleji než prokluz.
Při určitém prokluzu dosáhne točivý moment své maximální hodnoty a poté začne klesat. Hodnota, při které bude moment maximální, se nazývá kritická (Scr).
V grafické podobě lze mechanické vlastnosti asynchronního elektromotoru vyjádřit pomocí Klossova vzorce:

kde, Mк – to je kritický moment, který je určen kritickým prokluzem elektromotoru.
Rozvrh je založen na charakteristikách uvedených v pasu krevního tlaku. Pokud vyvstanou otázky ohledně pohonu, je tento graf použit jako pohonné zařízení pomocí asynchronního elektromotoru.
Kritický moment určuje velikost přípustného okamžitého přetížení elektromotoru. Když dojde k kritičtějšímu momentu (tedy kritičtějšímu skluzu), dojde k tzv. zhasnutí elektromotoru a zastavení motoru. Rollover je jedním z nouzových režimů.

Metody měření
Existuje několik způsobů, jak měřit skluz indukčního motoru. Pokud se rychlost otáčení výrazně liší od synchronní, lze ji měřit pomocí otáčkoměru nebo tachogenerátoru připojeného k EM hřídeli.
Možnost měření stroboskopickou metodou pomocí neonové lampy je vhodná pro hodnoty skluzu maximálně 5 %. K tomu je na hřídeli motoru buď vyznačena speciální čára křídou, nebo je instalován speciální stroboskopický disk. Jsou osvětleny neonovou lampou a rotace se počítá po určitou dobu, poté se provádějí výpočty pomocí speciálních vzorců. Je možné použít i plnohodnotný stroboskop, podobný tomu níže uvedenému.
Také metoda indukční cívky je vhodná pro měření velikosti skluzu všech typů strojů. Cívku je nejlepší použít z relé nebo stejnosměrného stykače, vzhledem k počtu závitů (je jich 10-20 tisíc) by měl být počet závitů alespoň 3000. Cívka s připojeným citlivým milivoltmetrem je umístěna u konec hřídele rotoru. Na základě výchylek jehly přístroje (počet kmitů) za určitou dobu se pomocí vzorce vypočte velikost skluzu. Skluz asynchronního motoru s vinutým rotorem lze navíc měřit pomocí magnetoelektrického ampérmetru. Ampérmetr je připojen k jedné z fází rotoru a výpočty se provádějí na základě počtu odchylek jehly ampérmetru (pomocí vzorce z metody indukční cívky).
Podívali jsme se tedy na to, co je skluz asynchronního motoru a jak jej určit. Pokud máte nějaké dotazy, zeptejte se je v komentářích pod článkem!
Související materiály:
Zveřejněno 16.09.2019 Aktualizováno 16.09.2019 Alexandrem (administrátorem)
V důsledku interakce magnetického pole s proudy v rotoru asynchronního motoru vzniká točivý elektromagnetický moment, který má tendenci vyrovnávat rychlost otáčení magnetického pole statoru a rotoru.
Rozdíl v rychlosti otáčení magnetického pole statoru a rotoru asynchronního motoru je charakterizován hodnotou skluzu s = (n 1 – n 2 ) / n 1, kde n 1 je synchronní rychlost otáčení motoru. pole, ot/min, n2 je rychlost otáčení rotoru asynchronního motoru, ot/min . Při provozu se jmenovitou zátěží je skluz obvykle malý, takže např. u elektromotoru s n 1 = 1500 ot./min., n2 = 1 460 ot./min. je skluz roven: s = ((1500 – 1460) / 1500 ) x 100 = 2,7 %

Asynchronní motor nemůže dosáhnout synchronní rychlosti otáčení ani s trojrozpojeným mechanismem, protože s ním nebudou vodiče rotoru křížit magnetické pole, nebude se v nich indukovat EMF a nebude proudit. Asynchronní moment při s = 0 bude nulový.
V počátečním okamžiku rozběhu protéká vinutím rotoru proud o síťové frekvenci. Jak rotor zrychluje, frekvence proudu v něm bude určena skluzem asynchronního motoru: f2 = s x f1, kde f1 je frekvence proudu dodávaného do statoru.
Odpor rotoru závisí na frekvenci proudu v něm a čím vyšší je frekvence, tím větší je jeho indukční reaktance. Jak se zvyšuje indukční reaktance rotoru, zvyšuje se fázový posun mezi napětím a proudem ve vinutí statoru.
Při spouštění asynchronních motorů je tedy účiník výrazně nižší než při běžném provozu. Velikost proudu je určena ekvivalentní hodnotou odporu elektromotoru a přiváděného napětí.
Hodnota ekvivalentního odporu asynchronního motoru se změnou skluzu se mění podle složitého zákona. Při poklesu skluzu v rozsahu 1 – 0,15 se odpor zpravidla zvýší ne více než 1,5krát, v rozsahu od 0,15 do s nom 5-7krát vzhledem k počáteční hodnotě při spuštění.
Hodnota proudu se mění nepřímo úměrně změně ekvivalentního odporu, takže při rozběhu do skluzu řádově 0,15 proud mírně klesá a poté rychle klesá.
Točivý moment elektromotoru je určen velikostí magnetického toku, proudu a úhlového posunu mezi emf a proudem v rotoru. Každá z těchto veličin zase závisí na skluzu, proto se pro studium výkonnostních charakteristik asynchronních motorů stanoví závislost točivého momentu na skluzu a vliv dodávaného napětí a frekvence na něj.
Točivý moment otáčení může být také určen elektromagnetickým výkonem na hřídeli jako poměr tohoto výkonu k úhlové rychlosti rotoru. Velikost točivého momentu je úměrná druhé mocnině napětí a nepřímo úměrná druhé mocnině frekvence.

Charakteristické hodnoty točivého momentu v závislosti na skluzu (nebo rychlosti) jsou počáteční hodnota točivého momentu (když elektromotor stále stojí), maximální hodnota točivého momentu (a odpovídající skluz, nazývaný kritický) a minimální hodnota točivého momentu v limitu otáček ze stacionárního stavu do jmenovitého.
Hodnoty točivého momentu pro jmenovité napětí jsou uvedeny v katalozích pro elektrické stroje. Znalost minimálního točivého momentu je nezbytná při výpočtu přípustnosti spuštění nebo samospouštění mechanismu s plným zatížením mechanismu. Proto musí být jeho hodnota pro konkrétní výpočty buď určena, nebo získána z dodávajícího závodu.
Hodnota maximálního momentu je dána rozptylovou indukční reaktancí statoru a rotoru a nezávisí na hodnotě odporu rotoru.
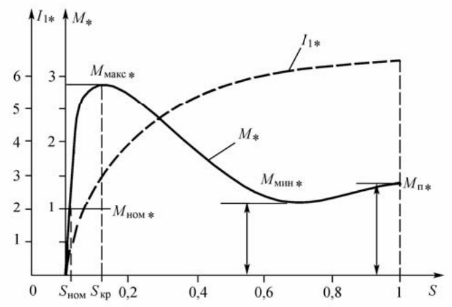
Závislost proudu a točivého momentu na skluzu
Kritický skluz je určen poměrem odporu rotoru k ekvivalentnímu odporu (určeném činným odporem statoru a indukčním svodovým odporem statoru a rotoru).
Zvýšení pouze aktivního odporu rotoru je doprovázeno zvýšením kritického skluzu a posunem maximálního momentu do oblasti vyšších skluzů (nižší otáčky). Tímto způsobem lze dosáhnout změny charakteristik momentů.
Změna prokluzu je možná zvýšením odporu rotoru nebo průtoku. První možnost je proveditelná pouze pro asynchronní motory s vinutým rotorem (od S = 1 do S = Snom), ale není ekonomická. Druhá možnost je proveditelná změnou napájecího napětí, ale pouze směrem dolů. Regulační rozsah je malý, protože S se zvětšuje, ale zároveň se snižuje přetížitelnost asynchronního motoru. Z hlediska účinnosti jsou obě možnosti přibližně rovnocenné.
U asynchronních motorů s vinutým rotorem se změna točivého momentu při různých skluzech provádí pomocí odporu zavedeného do obvodu vinutí rotoru. U indukčních motorů s kotvou nakrátko lze změny točivého momentu dosáhnout použitím variabilních motorů nebo použitím frekvenčních měničů.
Telegramový kanál pro ty, kteří se chtějí každý den učit nové a zajímavé věci: Škola pro elektrikáře
Pokud se vám tento článek líbil, sdílejte odkaz na něj na sociálních sítích. Velmi to pomůže rozvoji našeho webu!















