Způsob výběru elektromotoru podle výkonu pro různé reálné provozní režimy stroje (mechanismu) je založen na nepřímém posouzení výkonu tepelných ztrát prostřednictvím ekvivalentních, podle topných podmínek, proudových hodnot hlavního okruhu el. elektromotor nebo zátěžový moment , nebo napájení na jeho hřídeli. Tyto ekvivalentní veličiny jsou zavedeny z podmínky rovnosti jimi způsobených tepelných ztrát a síly tepelných ztrát.
Pokud během provozu elektromotoru zůstane aktivní odpor hlavního obvodu nezměněn, použije se; pokud je točivý moment vyvíjený elektromotorem úměrný síle proudu v hlavním obvodu a budicí magnetický tok je konstantní, použije se; je-li výkon vyvíjený elektromotorem úměrný proudu v hlavním obvodu, t.j. je-li použit.
Použití ekvivalentních hodnot je možné pouze se známým diagramem zatížení ve formě závislosti točivého momentu nebo výkonu v závislosti na čase. Způsob výběru elektromotoru se skládá ze dvou fází: předběžné a konečné. To je způsobeno nedostatkem úplných charakteristik kinematických a inerciálních parametrů v počátečním okamžiku výběru elektromotoru. K dispozici jsou pouze výchozí technické specifikace, údaje charakterizující kinematické parametry servomotoru a parametry prováděné technologické operace, dále řada geometrických parametrů, hmotnosti součástí a dílů.
Obecně se výpočet provádí v následujícím pořadí:
1 – vypracování kinematického schématu stroje, mechanismu, na základě technologického postupu stroje sestavení seznamu operací zařazených do jednoho cyklu včetně případných odchylek od nominálního procesu – havarijní stavy;
2 – předběžný výpočet doby trvání každé operace a přestávek podle technických specifikací bez zohlednění period zrychlování a zpomalování;
kde je lineární pohyb výkonného článku stroje, mechanismu při provádění i-té operace, m;

– jmenovitá lineární rychlost výkonného článku stroje, mechanismus při provádění i-té operace, m/s;
– úhlové posunutí, úhel natočení výkonného článku stroje, mechanismus při provádění i-té operace, rad;

– jmenovitá úhlová rychlost výkonného článku stroje, mechanismus při provádění i-té operace, rad/s.
Pokud je při provádění i-té operace známa rychlost otáčení rpm pohonu, pak:
Délka přestávek je dána prováděným technologickým postupem.
3 – vypracování návrhového schématu a výpočet statického zatížení při každé operaci včetně havarijní situace: síly, momenty, výkony na výkonném, pracovním článku stroje, mechanismu;
4 – sestavení předběžného diagramu zatížení pro celý cyklus dle bodů 1-3, výpočet . ;
5 – analýza diagramu a předběžné určení provozního režimu;
6 – výpočet točivého momentu, výkonu pro předběžný výběr elektromotoru podle způsobu odpovídajícího režimu pomocí schématu v odst. 4;
7 – předběžný výběr elektromotoru s odpovídajícím jmenovitým provozním režimem podle odst. 6 s přihlédnutím k ustanovení § 2;
8 – výpočet kinematických parametrů: převodové poměry, úhlové a lineární rychlosti, zrychlení v celém kinematickém řetězci mechanismu stroje; výběr převodovek, spojek, brzd a v případě potřeby výpočet geometrických parametrů dílů na základě podmínek pevnosti a tuhosti;
9 – výpočet setrvačných parametrů všech součástí a částí stroje (mechanismu), jejich přivedení na hřídel elektromotoru.

, kgм 2
kde je moment setrvačnosti spojky motoru, kgm 2 ;
– moment setrvačnosti brzdové řemenice, kgm 2 ;

– koeficient, který zohledňuje momenty setrvačnosti částí hnacího mechanismu (převodovka, ozubená kola, hlavní spojka atd.);
-moment setrvačnosti rotující i-té části servomotoru, kgm 2 ;

– hmotnost progresivně se pohybující i-té části pohonu, kg;

– úhlová rychlost i-té části akčního členu, s -1 ;
– jmenovitá úhlová rychlost kotvy elektromotoru, s -1;

– lineární rychlost i-té části akčního členu, m/s;
i – počet elektromotorů, motorových spojek, brzd v pohonu.
Hodnoty momentů setrvačnosti kotvy, rotoru elektromotoru, spojek, brzdových kladek jsou zjišťovány z katalogů, ostatní díly jsou vypočteny ze závislostí uvedených v literatuře [3, s. 51; 4, str. 26].
10 – výpočet doby (času) zrychlení (start), brzdění, rovnoměrný pohyb pro všechny operace cyklu;
S dostatečnou přesností pro praktické účely je obvykle přijímán lichoběžníkový zákon změny rychlosti výkonného článku s lineárními závislostmi během období zrychlování a zpomalování, Obr. 3.2. V tomto případě doba trvání ustáleného pohybu:
kde je čas spuštění pro i-tou operaci, s;
– doba brzdění pro i-oh operace, str.
Výpočet se provádí podle obecně uznávaných závislostí [3]:
kde je průměrný rozběhový moment předem zvoleného elektromotoru, Nm;

– průměrný brzdný moment vyvinutý předem zvoleným elektromotorem při elektrickém brzdění, Nm;
– statický moment během zrychlování a brzdění při provádění i-té operace, redukovaný na hřídel elektromotoru, Nm.
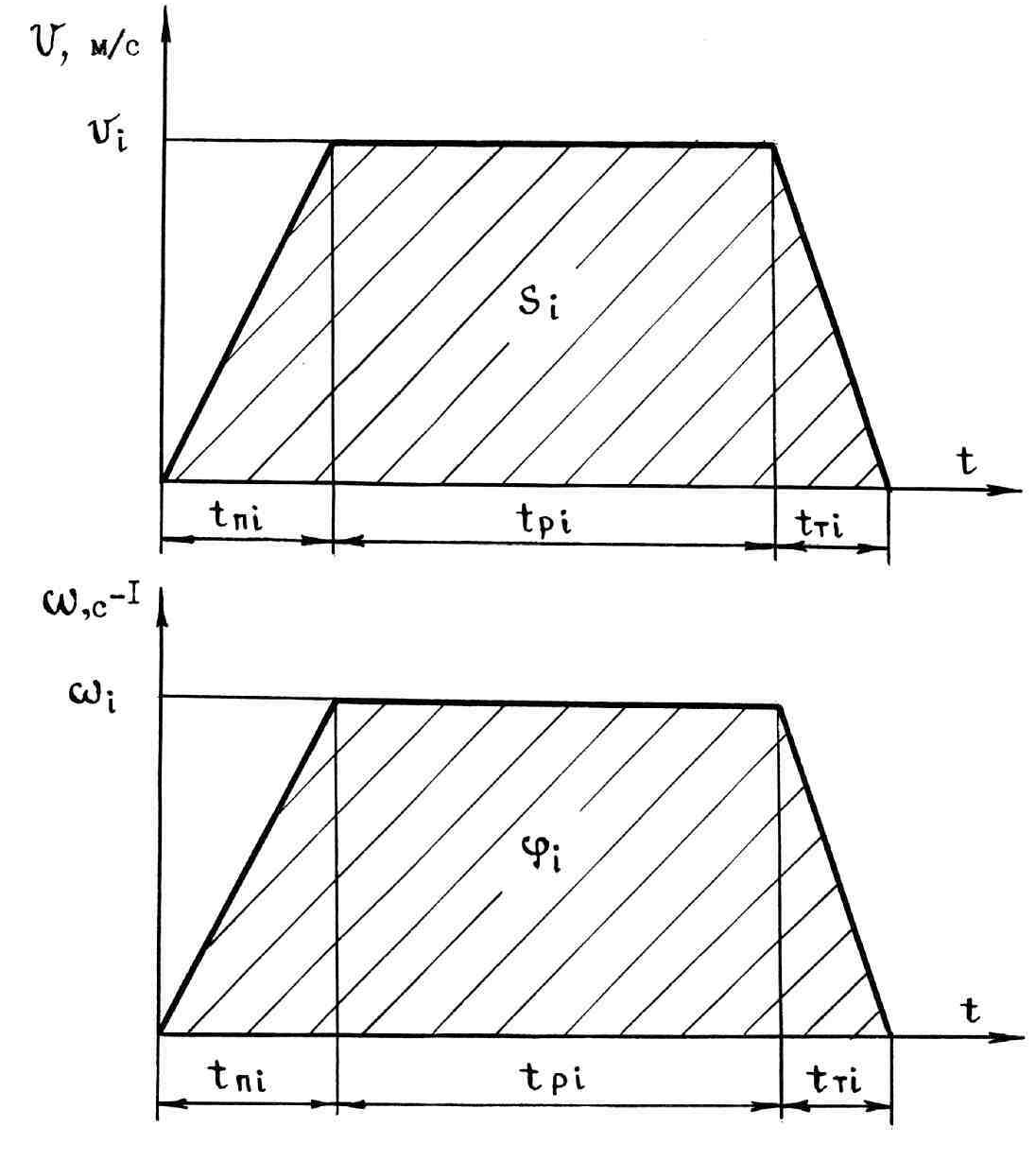
Obrázek 3.2 – Lichoběžníkový zákon změny rychlosti

Při dosazování hodnoty do vypočtených závislostí se zohledňuje její znaménko.
Je třeba mít na paměti, že výpočet nezohledňuje brzdný moment mechanické brzdy. Brzdění zajišťuje elektromotor (elektrické brzdění) a brzda slouží k přidržení zastaveného pohonu po vypnutí elektromotoru. U statického momentu dosazeného v závislosti (3.14) je jeho hodnota převzata ze zátěžového diagramu pro periody zrychlování a zpomalování.
V praktických činnostech je akceptováno:
, Нм
, Нм

kde je počáteční rozběhový moment předem zvoleného elektromotoru podle katalogu, Nm;

– násobek rozběhového momentu předem zvoleného motoru dle katalogu;
– minimální rozběhový moment předvoleného elektromotoru při spínání rozběhových stupňů, Nm. Pro střídavé elektromotory s rotorem nakrátko, pro ostatní.
– minimální násobek rozběhového momentu při přepínání rozběhových stupňů. U střídavých elektromotorů s rotorem nakrátko je to u ostatních obecně akceptováno, i když je to možné [3];
– jmenovitý moment předvoleného elektromotoru, Nm.

kde je jmenovitý výkon předem zvoleného elektromotoru, W.
Pokud jde o průměrný brzdný moment při elektrickém brzdění Tbrzda.sr, pak se jeho hodnota bere jako rovna průměrnému rozběhovému momentu. Nezaměňujte s brzdným momentem mechanické brzdy. Mechanická brzda se volí podle brzdného momentu, jehož hodnota je dána funkcemi stroje nebo mechanismu.
Používají se také následující metody výpočtu:
doba trvání zrychlení a zpomalení se bere jako konkrétní hodnota vycházející z provozní praxe podobných strojů;
Doba trvání zrychlení a zpomalení se vypočítává na základě přípustných nebo doporučených hodnot zrychlení s přihlédnutím k technologickému účelu stroje, mechanismu nebo jiným omezením – žádné prokluzování, smyk apod.
kde je přípustné, doporučené lineární zrychlení výkonného článku stroje, mechanismus při zrychlení při i-té operaci, m/s 2 ;
– přípustné, doporučené úhlové zrychlení výkonného článku stroje, mechanismus při zrychlení při i-té operaci, rad/s 2 ;
– přípustné, doporučené lineární zpomalení výkonného článku stroje, mechanismus při brzdění při i-té operaci, m/s 2 ;
– přípustné, doporučené úhlové zpomalení výkonného článku stroje, mechanismus při brzdění při i-té operaci, rad/s 2.
11 – výpočet statického, dynamického a celkového zatížení hřídele elektromotoru pro všechny operace cyklu včetně havarijního stavu. Pokud si předem zvolený elektromotor za provozu zachovává konstantní aktivní odpor, například sériově buzený stejnosměrný elektromotor, pak v tomto okamžiku pomocí mechanických charakteristik elektromotoru budou aktuální hodnoty pro odpovídající hodnoty zatížení jsou nalezeny.

, Нм
kde je úhlové zrychlení, zpomalení kotvy elektromotoru při zrychlení, brzdění při i-té operaci, s -2.
s-2; ,с -2 ;
, Нм.
12 – sestavení aktualizovaného diagramu zatížení pro celý cyklus dle bodů 2, 4, 10, 11, výpočet aktualizovaných hodnot . ;
13 – rozbor diagramu a objasnění provozního režimu;
14 – výpočet točivého momentu, výkonu pro konečný výběr elektromotoru podle způsobu odpovídajícího režimu pomocí zpřesněného schématu odstavce 12;
15 – volba elektromotoru s přihlédnutím k údajům v bodech 13, 14;
16 – úprava výsledků výpočtu bodů 8-12 v případě nesouladu mezi dříve a nakonec vybraným elektromotorem;
17 – kontrola elektromotoru zvoleného v bodě 15 podle startovacích podmínek, aniž by se ztratila nouzová situace;
18 – kontrola přetížitelnosti elektromotoru zvoleného v bodě 15, aniž byste ztratili přehled o nouzové situaci;
19 – v případě nesplnění podmínek odstavců 17 nebo 18 výběr nového elektromotoru splňujícího požadavky těchto odstavců a následná úprava výpočtů podle odstavců 8-12;
Výše uvedená metodika podléhá úpravě odstraněním řady bodů v souladu s provozním režimem uvažovaného skutečného stroje (mechanismu).
















